Wirelessly steerable bioelectronic neuromuscular robots adapting neurocardiac junctions
IF 26.1
1区 计算机科学
Q1 ROBOTICS
引用次数: 0
Abstract
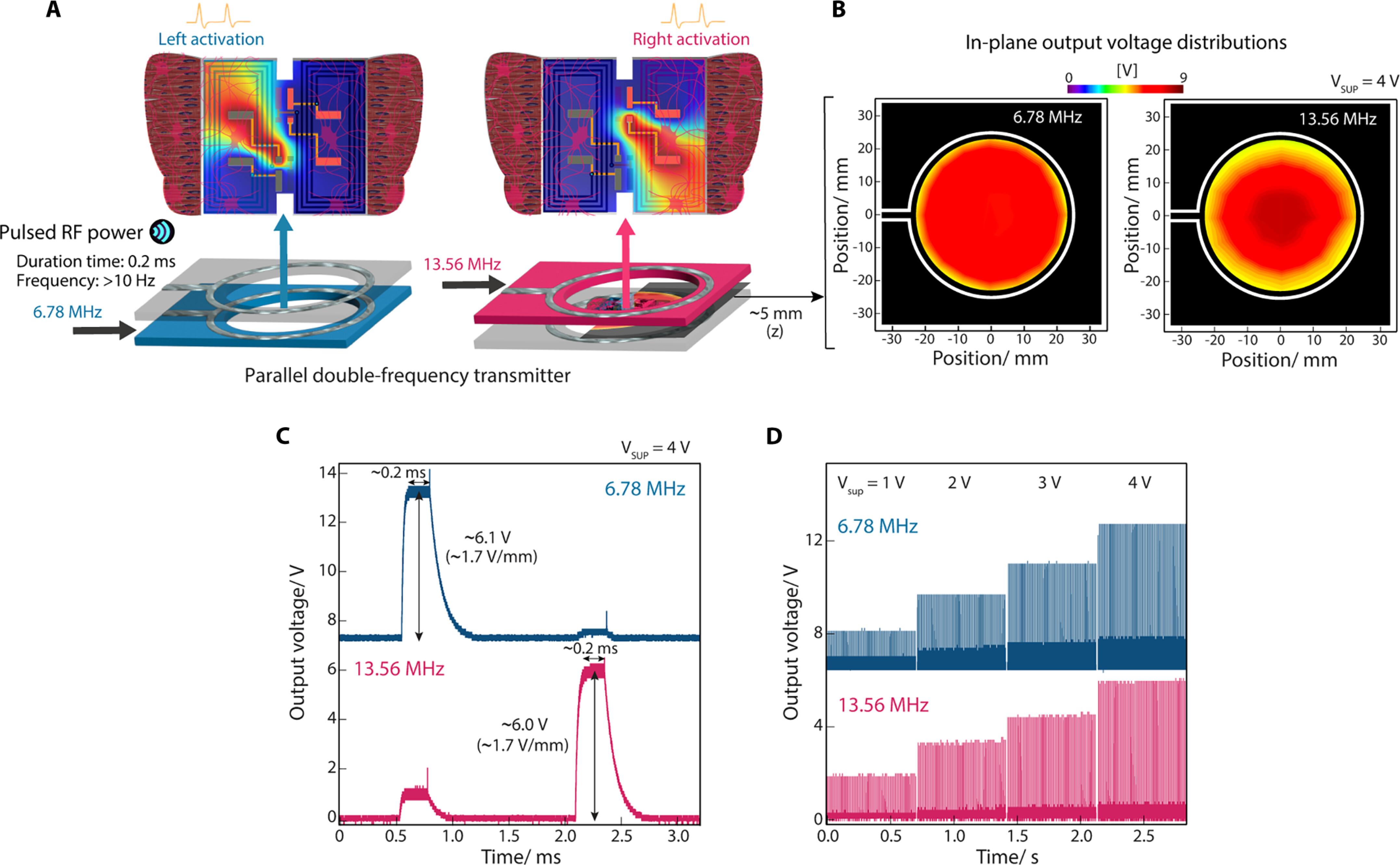
Biological motions of native muscle tissues rely on the nervous system to interface movement with the surrounding environment. The neural innervation of muscles, crucial for regulating movement, is the fundamental infrastructure for swiftly responding to changes in body tissue requirements. This study introduces a bioelectronic neuromuscular robot integrated with the motor nervous system through electrical synapses to evoke cardiac muscle activities and steer robotic motion. Serving as an artificial brain and wirelessly regulating selective neural activation to initiate robot fin motion, a wireless frequency multiplexing bioelectronic device is used to control the robot. Frequency multiplexing bioelectronics enables the control of the robot locomotion speed and direction by modulating the flapping of the robot fins through the wireless motor innervation of cardiac muscles. The robots demonstrated an average locomotion speed of ~0.52 ± 0.22 millimeters per second, fin-flapping frequency up to 2.0 hertz, and turning locomotion path curvature of ~0.11 ± 0.04 radians per millimeter. These systems will contribute to the expansion of biohybrid machines into the brain-to-motor frontier for developing autonomous biohybrid systems capable of advanced adaptive motor control and learning.
可无线转向的生物电子神经肌肉机器人可调整神经心肌接头
原生肌肉组织的生物运动依赖于神经系统将运动与周围环境连接起来。肌肉的神经支配是调节运动的关键,也是快速响应身体组织需求变化的基础架构。本研究介绍了一种生物电子神经肌肉机器人,它通过电突触与运动神经系统整合,以唤起心肌活动并引导机器人运动。无线频率多路复用生物电子装置可充当人工大脑,通过无线调节选择性神经激活来启动机器人鳍运动,从而控制机器人。频率多路复用生物电子装置可通过对心肌的无线运动神经支配来调节机器人鳍的拍动,从而控制机器人的运动速度和方向。机器人的平均运动速度约为每秒 0.52 ± 0.22 毫米,鳍拍打频率高达 2.0 赫兹,转弯运动路径曲率约为每毫米 0.11 ± 0.04 弧度。这些系统将有助于把生物混合机器扩展到大脑到运动的前沿领域,从而开发出能够进行高级自适应运动控制和学习的自主生物混合系统。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

Science Robotics
Mathematics-Control and Optimization
CiteScore
30.60
自引率
2.80%
发文量
83
期刊介绍:
Science Robotics publishes original, peer-reviewed, science- or engineering-based research articles that advance the field of robotics. The journal also features editor-commissioned Reviews. An international team of academic editors holds Science Robotics articles to the same high-quality standard that is the hallmark of the Science family of journals.
Sub-topics include: actuators, advanced materials, artificial Intelligence, autonomous vehicles, bio-inspired design, exoskeletons, fabrication, field robotics, human-robot interaction, humanoids, industrial robotics, kinematics, machine learning, material science, medical technology, motion planning and control, micro- and nano-robotics, multi-robot control, sensors, service robotics, social and ethical issues, soft robotics, and space, planetary and undersea exploration.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


