{"title":"Deep-Learning-Assisted Triboelectric Whisker Sensor Array for Real-Time Motion Sensing of Unmanned Underwater Vehicle","authors":"Bo Liu, Bowen Dong, Hao Jin, Peng Zhu, Zhaoyang Mu, Yuanzheng Li, Jianhua Liu, Zhaochen Meng, Xinyue Zhou, Peng Xu, Minyi Xu","doi":"10.1002/admt.202401053","DOIUrl":null,"url":null,"abstract":"<p>Aquatic animals can perceive their surrounding flow fields through highly evolved sensory systems. For instance, a seal whisker array understands the hydrodynamic field that allows seals to forage and navigate in dark environments. In this work, a deep learning-assisted underwater triboelectric whisker sensor array (TWSA) is designed for the 3D motion estimation and near-field perception of unmanned underwater vehicles. Each sensor comprises a high aspect ratio elliptical whisker shaft, four sensing units at the root of the elliptical whisker shaft, and a flexible corrugated joint simulating the skin on the cheek surface of aquatic animals. The TWSA effectively identifies flow velocity and direction in the 3D underwater environments and exhibits a rapid response time of 19 ms, a high sensitivity of 0.2<i>V</i>/<i>ms</i><sup>−1</sup>, and a signal-to-noise ratio of 58 dB. The device also locks onto the frequency of the upstream wake vortex, achieving a minimal detection accuracy of 81.2%. Moreover, when integrated with an unmanned underwater vehicle, the TWSA can estimate 3D trajectories assisted by a trained deep learning model, with a root mean square error of ≈0.02. Thus, the TWSA-based assisted perception holds immense potential for enhancing unmanned underwater vehicle near-field perception and navigation capabilities across a wide range of applications.</p>","PeriodicalId":7292,"journal":{"name":"Advanced Materials Technologies","volume":"10 3","pages":""},"PeriodicalIF":6.4000,"publicationDate":"2024-09-20","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Advanced Materials Technologies","FirstCategoryId":"88","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1002/admt.202401053","RegionNum":3,"RegionCategory":"材料科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"MATERIALS SCIENCE, MULTIDISCIPLINARY","Score":null,"Total":0}
引用次数: 0
Abstract
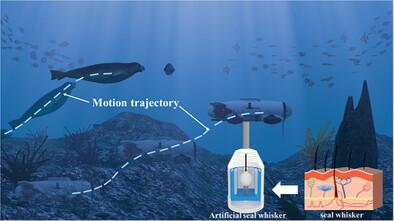
Aquatic animals can perceive their surrounding flow fields through highly evolved sensory systems. For instance, a seal whisker array understands the hydrodynamic field that allows seals to forage and navigate in dark environments. In this work, a deep learning-assisted underwater triboelectric whisker sensor array (TWSA) is designed for the 3D motion estimation and near-field perception of unmanned underwater vehicles. Each sensor comprises a high aspect ratio elliptical whisker shaft, four sensing units at the root of the elliptical whisker shaft, and a flexible corrugated joint simulating the skin on the cheek surface of aquatic animals. The TWSA effectively identifies flow velocity and direction in the 3D underwater environments and exhibits a rapid response time of 19 ms, a high sensitivity of 0.2V/ms−1, and a signal-to-noise ratio of 58 dB. The device also locks onto the frequency of the upstream wake vortex, achieving a minimal detection accuracy of 81.2%. Moreover, when integrated with an unmanned underwater vehicle, the TWSA can estimate 3D trajectories assisted by a trained deep learning model, with a root mean square error of ≈0.02. Thus, the TWSA-based assisted perception holds immense potential for enhancing unmanned underwater vehicle near-field perception and navigation capabilities across a wide range of applications.
期刊介绍:
Advanced Materials Technologies Advanced Materials Technologies is the new home for all technology-related materials applications research, with particular focus on advanced device design, fabrication and integration, as well as new technologies based on novel materials. It bridges the gap between fundamental laboratory research and industry.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


