Yingyi Wang, Shengzhao Li, Lin Liu, Simin Feng, Kejie Guan, Yixiang Shi, Fuqin Sun, Xiaowei Wang, Yaochun Shen, Cheng Zhang, Qianzuo Liu, Tie Li, Ting Zhang and Sujie Qin
{"title":"Novel two-dimensional conductive metal–organic framework-based heterostructures for high-performance electro-ionic soft actuators†","authors":"Yingyi Wang, Shengzhao Li, Lin Liu, Simin Feng, Kejie Guan, Yixiang Shi, Fuqin Sun, Xiaowei Wang, Yaochun Shen, Cheng Zhang, Qianzuo Liu, Tie Li, Ting Zhang and Sujie Qin","doi":"10.1039/D4TA04514A","DOIUrl":null,"url":null,"abstract":"<p >Current ionic artificial muscle technology necessitates a significant technological advancement to achieve increased bending strain, enhanced response rates, and prolonged stability while ensuring consistent and reliable performance across various stimuli. In this study, we aimed to develop an artificial muscle based on a novel nanocomposite composed of ionically cross-linked ZnO@Zn-CAT with poly(3,4-ethylenedioxythiophene)-poly(styrenesulfonate), showing an ultrafast rise time of less than 1.56 s in DC responses, an extremely large bending strain up to 1.22% in a very low input voltage regime (0.1 to 3 V), a long-term cycling stability of 97% up to 10 000 cycles, markedly reduced phase delay, and a very broad frequency bandwidth up to 20 Hz with good structural reliability under continuous electrical stimuli. Most importantly, the proposed ZnO@Zn-CAT-based soft actuator exhibits a remarkably enhanced strain of 2.38% and a blocking force of 66 mN under an extra 700 nm light stimulation, allowing for the realization of complex next-generation soft robotic devices, including wearable electronics and artificial muscles.</p>","PeriodicalId":82,"journal":{"name":"Journal of Materials Chemistry A","volume":null,"pages":null},"PeriodicalIF":10.7000,"publicationDate":"2024-09-18","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Materials Chemistry A","FirstCategoryId":"88","ListUrlMain":"https://pubs.rsc.org/en/content/articlelanding/2024/ta/d4ta04514a","RegionNum":2,"RegionCategory":"材料科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"CHEMISTRY, PHYSICAL","Score":null,"Total":0}
引用次数: 0
Abstract
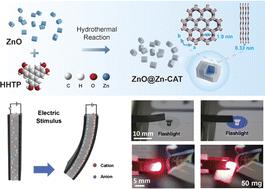
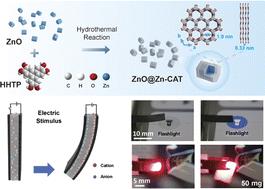
Current ionic artificial muscle technology necessitates a significant technological advancement to achieve increased bending strain, enhanced response rates, and prolonged stability while ensuring consistent and reliable performance across various stimuli. In this study, we aimed to develop an artificial muscle based on a novel nanocomposite composed of ionically cross-linked ZnO@Zn-CAT with poly(3,4-ethylenedioxythiophene)-poly(styrenesulfonate), showing an ultrafast rise time of less than 1.56 s in DC responses, an extremely large bending strain up to 1.22% in a very low input voltage regime (0.1 to 3 V), a long-term cycling stability of 97% up to 10 000 cycles, markedly reduced phase delay, and a very broad frequency bandwidth up to 20 Hz with good structural reliability under continuous electrical stimuli. Most importantly, the proposed ZnO@Zn-CAT-based soft actuator exhibits a remarkably enhanced strain of 2.38% and a blocking force of 66 mN under an extra 700 nm light stimulation, allowing for the realization of complex next-generation soft robotic devices, including wearable electronics and artificial muscles.
期刊介绍:
The Journal of Materials Chemistry A, B & C covers a wide range of high-quality studies in the field of materials chemistry, with each section focusing on specific applications of the materials studied. Journal of Materials Chemistry A emphasizes applications in energy and sustainability, including topics such as artificial photosynthesis, batteries, and fuel cells. Journal of Materials Chemistry B focuses on applications in biology and medicine, while Journal of Materials Chemistry C covers applications in optical, magnetic, and electronic devices. Example topic areas within the scope of Journal of Materials Chemistry A include catalysis, green/sustainable materials, sensors, and water treatment, among others.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


