Robots that evolve on demand
IF 79.8
1区 材料科学
Q1 MATERIALS SCIENCE, MULTIDISCIPLINARY
引用次数: 0
Abstract
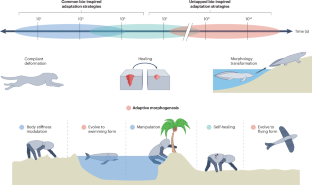
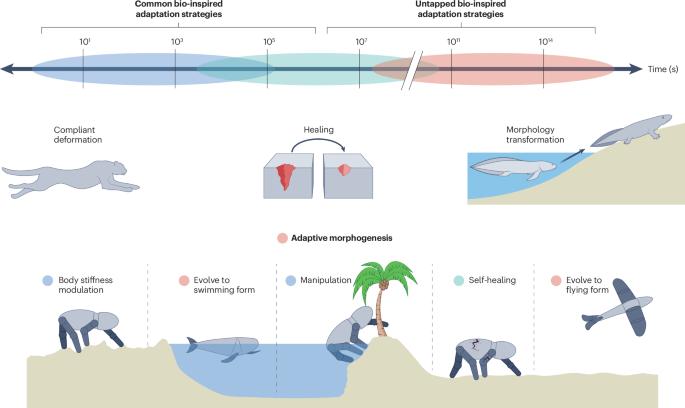
Now more than ever, researchers are rethinking the way robots are designed and controlled — from the algorithms that govern their actions to the very atomic structure of the materials they are made from. In this Perspective, we collect and comment on recent efforts towards multipurpose machines that use shape-morphing materials and components to adapt to changing environments. To frame our discussion, we point out biological adaptation strategies that have been adopted by robots across different sizes and timescales. This contextualization segways into the notion of adaptive morphogenesis, which is formally defined as a design strategy in which adaptive robot morphology and behaviours are realized through unified structural and actuation systems. However, since its introduction, the term has been more colloquially used to describe ‘evolution on demand’. We set out by giving examples of current systems that exhibit adaptive morphogenesis. Then, outlining projected key application areas of adaptive morphogenesis helps to scope the challenges and possibilities on the road to realizing future systems. We conclude by proposing performance metrics for benchmarking this emerging field. With this Perspective, we hope to spur dialogue among materials scientists, roboticists and biologists, and provide an objective lens through which we can analyse progress towards robots with rapidly mutable features that eclipse what is possible in biological processes. To meet the physical demands of a new environment, organisms evolve morphological and behavioural adaptations that specialize their locomotor performance to that niche. This Perspective discusses how robots can emulate — and perhaps even exceed — biological levels of adaptability through shape-morphing mechanisms and complementary control strategies to achieve compressed, rapid and reversible ‘evolution on demand’.
按需进化的机器人
现在,研究人员比以往任何时候都在重新思考机器人的设计和控制方式--从控制机器人行动的算法到机器人材料的原子结构。在本《视角》中,我们收集并评论了最近在多用途机器方面所做的努力,这些机器使用可变形的材料和部件来适应不断变化的环境。为了确定讨论的框架,我们指出了不同大小和时间尺度的机器人所采用的生物适应策略。适应性形态发生被正式定义为一种设计策略,通过统一的结构和执行系统实现机器人的适应性形态和行为。然而,自引入以来,该术语更多地被用来描述 "按需进化"。我们首先举例说明了当前展示自适应形态发生的系统。然后,概述自适应形态发生的预计关键应用领域,以帮助确定实现未来系统道路上的挑战和可能性。最后,我们提出了衡量这一新兴领域的性能指标。我们希望通过这一视角,促进材料科学家、机器人专家和生物学家之间的对话,并提供一个客观的视角,让我们能够分析机器人在实现快速变异功能方面取得的进展。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

Nature Reviews Materials
Materials Science-Biomaterials
CiteScore
119.40
自引率
0.40%
发文量
107
期刊介绍:
Nature Reviews Materials is an online-only journal that is published weekly. It covers a wide range of scientific disciplines within materials science. The journal includes Reviews, Perspectives, and Comments.
Nature Reviews Materials focuses on various aspects of materials science, including the making, measuring, modelling, and manufacturing of materials. It examines the entire process of materials science, from laboratory discovery to the development of functional devices.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


