Spatially Selective Ultraprecision Polishing and Cleaning by Collective Behavior of Micro Spinbots
引用次数: 0
Abstract
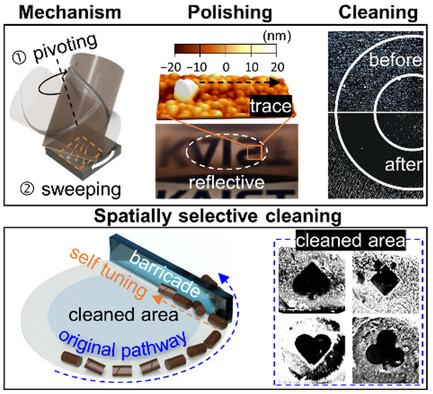
Untethered magnetic actuation is an attractive technique for controlling a batch of micrometer-sized soft robots. Recent advancements have enabled each robot to follow its path independently using a single magnetic device. However, applications of magnetic soft microrobots are mostly biased toward the biomedical field. In this study, thermoplastic polyurethane–Fe3O4 nanocomposite soft spinning microrobots, that is, spinbots that actuate on a tabletop magnetic stirrer, were utilized as innovative precision manufacturing tools for spatially selective precision polishing and cleaning. The pivot motion of the revolving spinbots, which involves repetitive sweeping during rotation cycles, is explored. This sweeping action physically removes nanometer-sized surface contaminants from the workpiece, achieving a cleaning efficiency of 99.6%. Multiple spinbots, up to 42 in total, simultaneously operated along their own orbital pathways on three vertically stacked wafers, thereby demonstrating an unprecedented cleaning method. In addition, the spinbots precisely removed materials from the workpiece using a three-body abrasion mechanism. Furthermore, the spinbots contributed to precise material removal, resulting in remarkable surface polishing (R a ≈ 1.8 nm). This novel polishing system, which uses the collective behavior of multiple spinbots on a tabletop magnetic stirrer, is 1000-fold lighter than current state-of-the-art equipment aimed at achieving similar levels of fine finishing.
利用微旋机器人的集体行为进行空间选择性超精密抛光和清洁
对于控制一批微米大小的软体机器人来说,无系磁力驱动是一项极具吸引力的技术。最近的进步使每个机器人都能使用单个磁性装置独立地沿着自己的路径前进。然而,磁性软微型机器人的应用大多偏向于生物医学领域。在这项研究中,热塑性聚氨酯-Fe3O4 纳米复合软旋转微机器人(即在桌面磁力搅拌器上驱动的旋转机器人)被用作创新的精密制造工具,用于空间选择性精密抛光和清洁。研究探讨了旋转旋转机器人的枢轴运动,其中包括在旋转周期内的重复清扫。这种清扫动作可物理去除工件上纳米级的表面污染物,清洁效率高达 99.6%。在三个垂直堆叠的晶片上,多个旋转机器人(总共多达 42 个)沿着各自的轨道路径同时运行,从而展示了一种前所未有的清洁方法。此外,自旋机器人还利用三体磨损机制精确地清除了工件上的材料。此外,自旋机器人还有助于精确去除材料,从而实现了出色的表面抛光(Ra ≈ 1.8 nm)。这种新颖的抛光系统利用台式磁力搅拌器上多个自旋机器人的集体行为,比目前旨在实现类似精细抛光水平的最先进设备轻 1000 倍。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


