Screen-Printed Capacitive Tactile Sensor for Monitoring Tool–Tissue Interactions and Grasping Performances of a Surgical Magnetic Microgripper
IF 4.3
3区 材料科学
Q1 ENGINEERING, ELECTRICAL & ELECTRONIC
引用次数: 0
Abstract
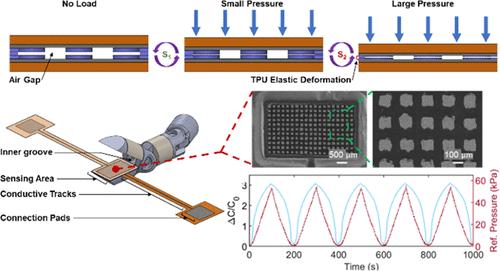
With miniaturization and wireless actuation for a class of magnetic microgrippers for robot-assisted minimally invasive endoscopic intraventricular surgery, surgeons are unable to acquire tactile sensory information on tissues and organs during tool–tissue manipulation and grasping tasks. To minimize the risks of tissue trauma and improve surgical performance, surgeons require haptic feedback technologies to be integrated onto microscale surgical tools for tactile information. However, current sensors cannot be equipped onto the interior jaw of the microgripper due to low-pressure range and small-scale criteria for RMIS implementation for pediatric neurosurgery. This study proposes a 24 mm2, ultrathin, and flexible capacitive tactile sensor for the interior jaws of a disposable surgical magnetically-controlled microgripper to potentially monitor and regulate tool–tissue manipulation pressures/forces in real time to improve grasping performances and quality of surgical procedures. To lower fabrication costs, multiple layers of the capacitive sensor were screen-printed and assembled to produce a 100 μm thick sensor. To enhance the range and sensitivity, four different morphologies were developed for the dielectric layer and integrated into the sensor design. The dielectric layers were fabricated by optimizing and processing thermoplastic polyurethane (TPU) into a suitable ink adequate for screen printing large surfaces and microstructures. The final optimized capacitive tactile sensor with a grid-like microstructured dielectric design’s electromechanical performance was modeled as a bilinear response with two sensitivity modes for a sensing range of 0.42–54.2 kPa (0.01–1.30 N applied on 24 mm2 of gripper jaw). The results also indicated performance comparable to more expensive tactile sensors with a hysteresis of 8.8% and a repeatable response to applied cycling loadings with a maximum response signal decay of 1.85%. This study highlights that simple screen printing method can be used as a low-cost alternative to fabricate high-performance tactile sensors to be integrated to the interior jaw of the microgripper designed for disposable endoscopic intraventricular surgeries.
丝网印刷电容式触觉传感器用于监测工具与组织之间的相互作用以及外科磁性微型夹钳的抓取性能
随着用于机器人辅助微创内窥镜椎管内手术的一类磁性微型夹具的微型化和无线驱动技术的发展,外科医生在进行工具-组织操作和抓取任务时无法获得组织和器官的触觉信息。为了最大限度地降低组织创伤风险并提高手术性能,外科医生需要将触觉反馈技术集成到微型手术工具上,以获取触觉信息。然而,由于小儿神经外科手术的低压范围和 RMIS 实施的小规模标准,目前的传感器无法安装在微型夹钳的内部钳口上。本研究提出了一种 24 平方毫米、超薄、灵活的电容式触觉传感器,用于一次性外科磁控微钳的内部钳口,可实时监测和调节工具与组织之间的操作压力/力,从而提高抓取性能和手术质量。为了降低制造成本,多层电容式传感器通过丝网印刷和组装制成了 100 μm 厚的传感器。为了提高量程和灵敏度,为电介质层开发了四种不同的形态,并将其集成到传感器设计中。电介质层是通过优化热塑性聚氨酯(TPU)并将其加工成适合丝网印刷大表面和微结构的油墨而制成的。最终优化的电容式触觉传感器采用网格状微结构电介质设计,其机电性能被模拟为双线性响应,在 0.42-54.2 kPa 的感应范围内具有两种灵敏度模式(在 24 平方毫米的夹钳上施加 0.01-1.30 牛顿)。研究结果还表明,该传感器的性能可与更昂贵的触觉传感器媲美,其滞后率为 8.8%,对施加的循环负载具有可重复的响应,最大响应信号衰减率为 1.85%。这项研究表明,简单的丝网印刷方法可以作为一种低成本的替代方法来制造高性能的触觉传感器,并将其集成到为一次性内窥镜静脉内手术而设计的微型夹钳的内部钳口上。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊
ACS Applied Electronic Materials
Multiple-
CiteScore
7.20
自引率
4.30%
发文量
567
期刊介绍:
ACS Applied Electronic Materials is an interdisciplinary journal publishing original research covering all aspects of electronic materials. The journal is devoted to reports of new and original experimental and theoretical research of an applied nature that integrate knowledge in the areas of materials science, engineering, optics, physics, and chemistry into important applications of electronic materials. Sample research topics that span the journal's scope are inorganic, organic, ionic and polymeric materials with properties that include conducting, semiconducting, superconducting, insulating, dielectric, magnetic, optoelectronic, piezoelectric, ferroelectric and thermoelectric.
Indexed/Abstracted:
Web of Science SCIE
Scopus
CAS
INSPEC
Portico
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


