Electronically configurable microscopic metasheet robots
IF 37.2
1区 材料科学
Q1 CHEMISTRY, PHYSICAL
引用次数: 0
Abstract
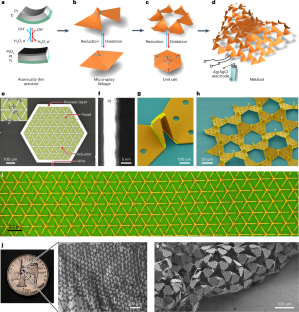
Shape morphing is vital to locomotion in microscopic organisms but has been challenging to achieve in sub-millimetre robots. By overcoming obstacles associated with miniaturization, we demonstrate microscopic electronically configurable morphing metasheet robots. These metabots expand locally using a kirigami structure spanning five decades in length, from 10 nm electrochemically actuated hinges to 100 μm splaying panels making up the ~1 mm robot. The panels are organized into unit cells that can expand and contract by 40% within 100 ms. These units are tiled to create metasheets with over 200 hinges and independent electronically actuating regions that enable the robot to switch between multiple target geometries with distinct curvature distributions. By electronically actuating independent regions with prescribed phase delays, we generate locomotory gaits. These results advance a metamaterial paradigm for microscopic, continuum, compliant, programmable robots and pave the way to a broad spectrum of applications, including reconfigurable micromachines, tunable optical metasurfaces and miniaturized biomedical devices. Shape transformations in microrobots less than 1 mm in size remain challenging. Here the authors present an electronically configurable metasheet microrobot with reprogrammable shapes and locomotory gaits in an electrolytic solution.

电子可配置微型元片机器人
形状变形对微观生物的运动至关重要,但在亚毫米机器人中实现形状变形却很困难。通过克服与微型化相关的障碍,我们展示了微观电子可配置变形元片机器人。这些新陈代谢机器人利用长度跨越五十年的 "叽里格米 "结构进行局部扩展,从 10 纳米的电化学致动铰链到 100 微米的平展板,构成了约 1 毫米的机器人。这些面板被组织成单元格,可在 100 毫秒内伸缩 40%。这些单元被拼接成具有 200 多个铰链和独立电子致动区域的元板,使机器人能够在具有不同曲率分布的多个目标几何形状之间切换。通过以规定的相位延迟对独立区域进行电子致动,我们产生了运动步态。这些成果推进了微观、连续、顺应、可编程机器人的超材料范式,并为可重构微型机械、可调光学超表面和微型生物医学设备等广泛应用铺平了道路。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

Nature Materials
工程技术-材料科学:综合
CiteScore
62.20
自引率
0.70%
发文量
221
审稿时长
3.2 months
期刊介绍:
Nature Materials is a monthly multi-disciplinary journal aimed at bringing together cutting-edge research across the entire spectrum of materials science and engineering. It covers all applied and fundamental aspects of the synthesis/processing, structure/composition, properties, and performance of materials. The journal recognizes that materials research has an increasing impact on classical disciplines such as physics, chemistry, and biology.
Additionally, Nature Materials provides a forum for the development of a common identity among materials scientists and encourages interdisciplinary collaboration. It takes an integrated and balanced approach to all areas of materials research, fostering the exchange of ideas between scientists involved in different disciplines.
Nature Materials is an invaluable resource for scientists in academia and industry who are active in discovering and developing materials and materials-related concepts. It offers engaging and informative papers of exceptional significance and quality, with the aim of influencing the development of society in the future.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


