Flexible Artificial Tactility with Excellent Robustness and Temperature Tolerance Based on Organohydrogel Sensor Array for Robot Motion Detection and Object Shape Recognition
IF 27.4
1区 材料科学
Q1 CHEMISTRY, MULTIDISCIPLINARY
引用次数: 0
Abstract
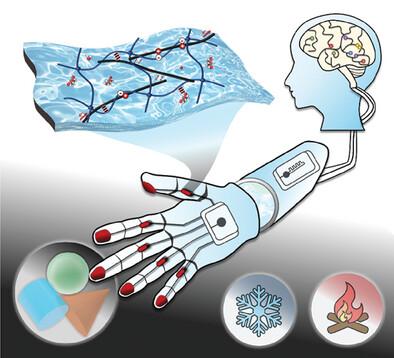
Hydrogel-based flexible artificial tactility is equipped to intelligent robots to mimic human mechanosensory perception. However, it remains a great challenge for hydrogel sensors to maintain flexibility and sensory performances during cyclic loadings at high or low temperatures due to water loss or freezing. Here, a flexible robot tactility is developed with high robustness based on organohydrogel sensor arrays with negligent hysteresis and temperature tolerance. Conductive polyaniline chains are interpenetrated through a poly(acrylamide-co-acrylic acid) network with glycerin/water mixture with interchain electrostatic interactions and hydrogen bonds, yielding a high dissipated energy of 1.58 MJ m−3, and ultralow hysteresis during 1000 cyclic loadings. Moreover, the binary solvent provides the gels with outstanding tolerance from −100 to 60 °C and the organohydrogel sensors remain flexible, fatigue resistant, conductive (0.27 S m−1), highly strain sensitive (GF of 3.88) and pressure sensitive (35.8 MPa−1). The organohydrogel sensor arrays are equipped on manipulator finger dorsa and pads to simultaneously monitor the finger motions and detect the pressure distribution exerted by grasped objects. A machine learning model is used to train the system to recognize the shape of grasped objects with 100% accuracy. The flexible robot tactility based on organohydrogels is promising for novel intelligent robots.
基于有机水凝胶传感器阵列的灵活人工触觉,具有出色的鲁棒性和耐温性,可用于机器人运动检测和物体形状识别
基于水凝胶的柔性人工触觉可用于智能机器人模拟人类的机械感知。然而,由于失水或冻结,水凝胶传感器在高温或低温的循环负载下如何保持柔韧性和感官性能仍然是一个巨大的挑战。本文基于可忽略滞后性和温度耐受性的有机水凝胶传感器阵列,开发了一种具有高鲁棒性的柔性机器人触觉装置。导电聚苯胺链通过聚(丙烯酰胺-共丙烯酸)网络与甘油/水混合物互穿,链间存在静电相互作用和氢键,从而产生了 1.58 MJ m-3 的高耗散能量,并且在 1000 次循环加载过程中滞后极低。此外,二元溶剂使凝胶在 -100 至 60 °C 温度范围内具有出色的耐受性,有机水凝胶传感器保持柔韧性、抗疲劳性、导电性(0.27 S m-1)、高应变灵敏度(GF 为 3.88)和压力灵敏度(35.8 MPa-1)。有机水凝胶传感器阵列安装在机械手的指背和指垫上,可同时监测手指运动并检测所抓物体施加的压力分布。该系统采用机器学习模型进行训练,能以 100% 的准确率识别所抓物体的形状。基于有机水凝胶的柔性机器人触觉技术有望用于新型智能机器人。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊
Advanced Materials
工程技术-材料科学:综合
CiteScore
43.00
自引率
4.10%
发文量
2182
审稿时长
2 months
期刊介绍:
Advanced Materials, one of the world's most prestigious journals and the foundation of the Advanced portfolio, is the home of choice for best-in-class materials science for more than 30 years. Following this fast-growing and interdisciplinary field, we are considering and publishing the most important discoveries on any and all materials from materials scientists, chemists, physicists, engineers as well as health and life scientists and bringing you the latest results and trends in modern materials-related research every week.
文献相关原料
| 公司名称 | 产品信息 | 采购帮参考价格 |
|---|
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


