Brandon G Pratt, Su-Yee J Lee, Grant M Chou, John C Tuthill
{"title":"Miniature linear and split-belt treadmills reveal mechanisms of adaptive motor control in walking Drosophila.","authors":"Brandon G Pratt, Su-Yee J Lee, Grant M Chou, John C Tuthill","doi":"10.1016/j.cub.2024.08.006","DOIUrl":null,"url":null,"abstract":"<p><p>To navigate complex environments, walking animals must detect and overcome unexpected perturbations. One technical challenge when investigating adaptive locomotion is measuring behavioral responses to precise perturbations during naturalistic walking; another is that manipulating neural activity in sensorimotor circuits often reduces spontaneous locomotion. To overcome these obstacles, we introduce miniature treadmill systems for coercing locomotion and tracking 3D kinematics of walking Drosophila. By systematically comparing walking in three experimental setups, we show that flies compelled to walk on the linear treadmill have similar stepping kinematics to freely walking flies, while kinematics of tethered walking flies are subtly different. Genetically silencing mechanosensory neurons altered step kinematics of flies walking on the linear treadmill across all speeds. We also discovered that flies can maintain a forward heading on a split-belt treadmill by specifically adapting the step distance of their middle legs. These findings suggest that proprioceptive feedback contributes to leg motor control irrespective of walking speed and that the fly's middle legs play a specialized role in stabilizing locomotion.</p>","PeriodicalId":11359,"journal":{"name":"Current Biology","volume":null,"pages":null},"PeriodicalIF":8.1000,"publicationDate":"2024-10-07","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11461123/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Current Biology","FirstCategoryId":"99","ListUrlMain":"https://doi.org/10.1016/j.cub.2024.08.006","RegionNum":1,"RegionCategory":"生物学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/8/30 0:00:00","PubModel":"Epub","JCR":"Q1","JCRName":"BIOCHEMISTRY & MOLECULAR BIOLOGY","Score":null,"Total":0}
引用次数: 0
Abstract
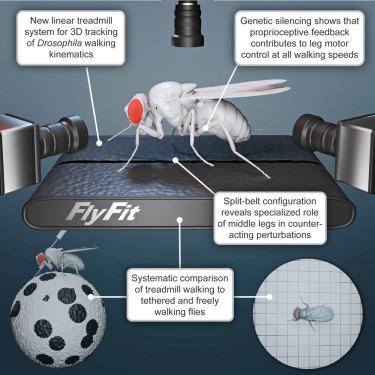
To navigate complex environments, walking animals must detect and overcome unexpected perturbations. One technical challenge when investigating adaptive locomotion is measuring behavioral responses to precise perturbations during naturalistic walking; another is that manipulating neural activity in sensorimotor circuits often reduces spontaneous locomotion. To overcome these obstacles, we introduce miniature treadmill systems for coercing locomotion and tracking 3D kinematics of walking Drosophila. By systematically comparing walking in three experimental setups, we show that flies compelled to walk on the linear treadmill have similar stepping kinematics to freely walking flies, while kinematics of tethered walking flies are subtly different. Genetically silencing mechanosensory neurons altered step kinematics of flies walking on the linear treadmill across all speeds. We also discovered that flies can maintain a forward heading on a split-belt treadmill by specifically adapting the step distance of their middle legs. These findings suggest that proprioceptive feedback contributes to leg motor control irrespective of walking speed and that the fly's middle legs play a specialized role in stabilizing locomotion.
期刊介绍:
Current Biology is a comprehensive journal that showcases original research in various disciplines of biology. It provides a platform for scientists to disseminate their groundbreaking findings and promotes interdisciplinary communication. The journal publishes articles of general interest, encompassing diverse fields of biology. Moreover, it offers accessible editorial pieces that are specifically designed to enlighten non-specialist readers.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


