{"title":"Dual-COPE: A novel prior-based category-level object pose estimation network with dual Sim2Real unsupervised domain adaptation module","authors":"Xi Ren , Nan Guo , Zichen Zhu , Xinbei Jiang","doi":"10.1016/j.cag.2024.104045","DOIUrl":null,"url":null,"abstract":"<div><p>Category-level pose estimation offers the generalization ability to novel objects unseen during training, which has attracted increasing attention in recent years. Despite the advantage, annotating real-world data with pose label is intricate and laborious. Although using synthetic data with free annotations can greatly reduce training costs, the Synthetic-to-Real (Sim2Real) domain gap could result in a sharp performance decline on real-world test. In this paper, we propose Dual-COPE, a novel prior-based category-level object pose estimation method with dual Sim2Real domain adaptation to avoid expensive real pose annotations. First, we propose an estimation network featured with conjoined prior deformation and transformer-based matching to realize high-precision pose prediction. Upon that, an efficient dual Sim2Real domain adaptation module is further designed to reduce the feature distribution discrepancy between synthetic and real-world data both semantically and geometrically, thus maintaining superior performance on real-world test. Moreover, the adaptation module is loosely coupled with estimation network, allowing for easy integration with other methods without any additional inference overhead. Comprehensive experiments show that Dual-COPE outperforms existing unsupervised methods and achieves state-of-the-art precision under supervised settings.</p></div>","PeriodicalId":50628,"journal":{"name":"Computers & Graphics-Uk","volume":"124 ","pages":"Article 104045"},"PeriodicalIF":2.5000,"publicationDate":"2024-08-14","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Computers & Graphics-Uk","FirstCategoryId":"94","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0097849324001808","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"COMPUTER SCIENCE, SOFTWARE ENGINEERING","Score":null,"Total":0}
引用次数: 0
Abstract
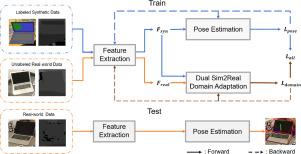
Category-level pose estimation offers the generalization ability to novel objects unseen during training, which has attracted increasing attention in recent years. Despite the advantage, annotating real-world data with pose label is intricate and laborious. Although using synthetic data with free annotations can greatly reduce training costs, the Synthetic-to-Real (Sim2Real) domain gap could result in a sharp performance decline on real-world test. In this paper, we propose Dual-COPE, a novel prior-based category-level object pose estimation method with dual Sim2Real domain adaptation to avoid expensive real pose annotations. First, we propose an estimation network featured with conjoined prior deformation and transformer-based matching to realize high-precision pose prediction. Upon that, an efficient dual Sim2Real domain adaptation module is further designed to reduce the feature distribution discrepancy between synthetic and real-world data both semantically and geometrically, thus maintaining superior performance on real-world test. Moreover, the adaptation module is loosely coupled with estimation network, allowing for easy integration with other methods without any additional inference overhead. Comprehensive experiments show that Dual-COPE outperforms existing unsupervised methods and achieves state-of-the-art precision under supervised settings.
期刊介绍:
Computers & Graphics is dedicated to disseminate information on research and applications of computer graphics (CG) techniques. The journal encourages articles on:
1. Research and applications of interactive computer graphics. We are particularly interested in novel interaction techniques and applications of CG to problem domains.
2. State-of-the-art papers on late-breaking, cutting-edge research on CG.
3. Information on innovative uses of graphics principles and technologies.
4. Tutorial papers on both teaching CG principles and innovative uses of CG in education.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


