Variable-stiffness–morphing wheel inspired by the surface tension of a liquid droplet
IF 26.1
1区 计算机科学
Q1 ROBOTICS
引用次数: 0
Abstract
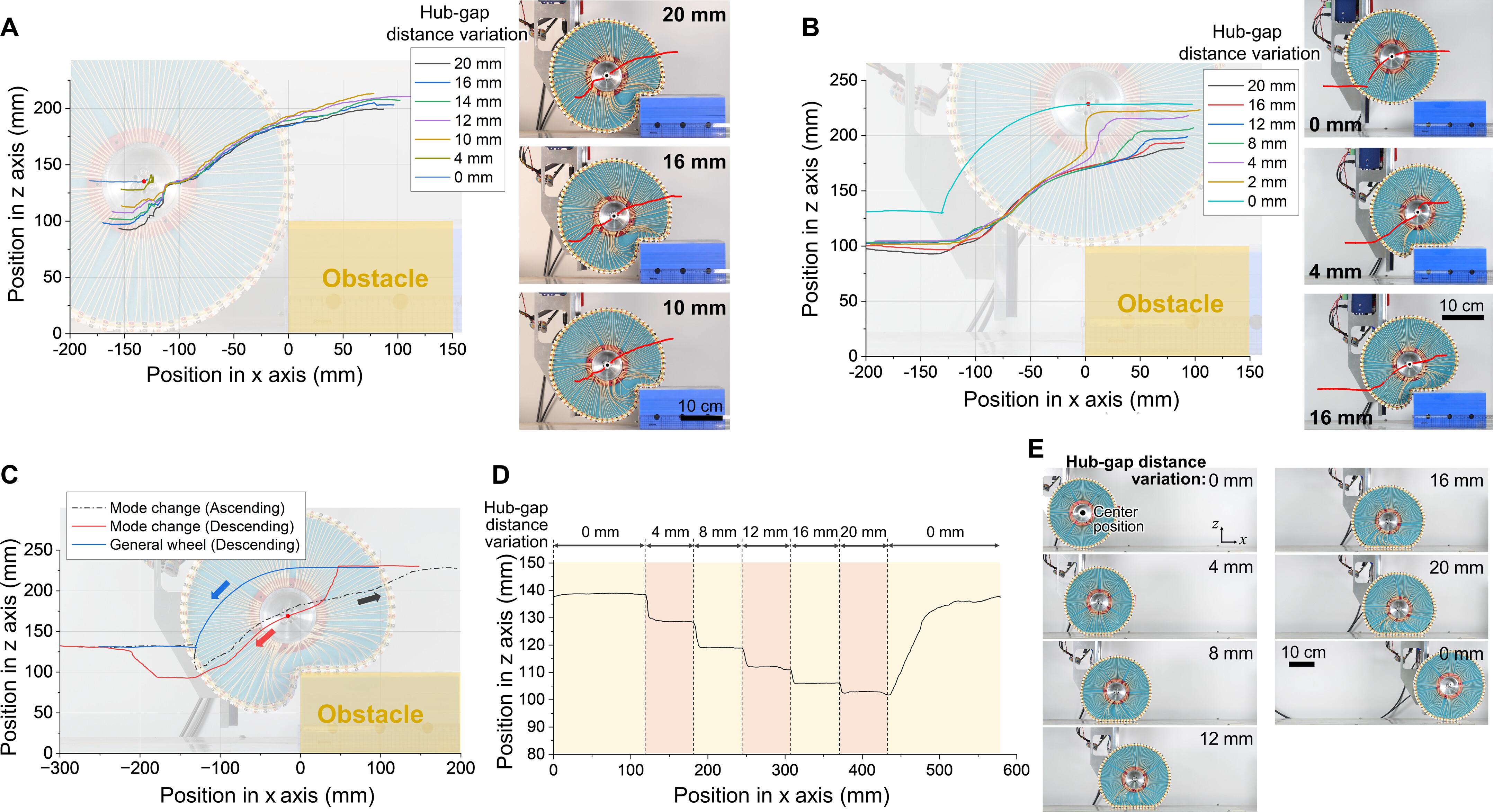
Wheels have been commonly used for locomotion in mobile robots and transportation systems because of their simple structure and energy efficiency. However, the performance of wheels in overcoming obstacles is limited compared with their advantages in driving on normal flat ground. Here, we present a variable-stiffness wheel inspired by the surface tension of a liquid droplet. In a liquid droplet, as the cohesive force of the outermost liquid molecules increases, the net force pulling the liquid molecules inward also increases. This leads to high surface tension, resulting in the liquid droplet reverting to a circular shape from its distorted shape induced by gravitational forces. Similarly, the shape and stiffness of a wheel were controlled by changing the traction force at the outermost smart chain block. As the tension of the wire spokes connected to each chain block increased, the wheel characteristics reflected those of a general circular-rigid wheel, which has an advantage in high-speed locomotion on normal flat ground. Conversely, the modulus of the wheel decreased as the tension of the wire spoke decreased, and the wheel was easily deformed according to the shape of obstacles. This makes the wheel suitable for overcoming obstacles without requiring complex control or sensing systems. On the basis of this mechanism, a wheel was applied to a two-wheeled wheelchair system weighing 120 kilograms, and the state transition between a circular high-modulus state and a deformable low-modulus state was realized in real time when the wheelchair was driven in an outdoor environment.
受液滴表面张力启发的可变刚度变形轮。
车轮因其结构简单、能效高而被普遍用于移动机器人和运输系统的运动。然而,与在普通平地上行驶的优势相比,车轮在克服障碍物方面的性能有限。在此,我们介绍一种受液滴表面张力启发的可变刚度车轮。在液滴中,随着最外层液体分子内聚力的增加,液体分子向内的净拉力也随之增加。这就导致了高表面张力,使液滴从重力作用下的扭曲形状恢复成圆形。同样,通过改变最外层智能链块的牵引力,可以控制车轮的形状和刚度。随着与每个链块相连的钢丝辐条张力的增加,车轮的特性反映了一般圆形刚性车轮的特性,这在正常平地上的高速运动中具有优势。相反,车轮的模量随着金属丝辐条张力的减小而减小,车轮很容易根据障碍物的形状而变形。这使得车轮无需复杂的控制或传感系统即可克服障碍。在这一机制的基础上,将轮子应用到重达 120 千克的双轮轮椅系统中,当轮椅在室外环境中行驶时,实时实现了圆形高模量状态和可变形低模量状态之间的状态转换。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

Science Robotics
Mathematics-Control and Optimization
CiteScore
30.60
自引率
2.80%
发文量
83
期刊介绍:
Science Robotics publishes original, peer-reviewed, science- or engineering-based research articles that advance the field of robotics. The journal also features editor-commissioned Reviews. An international team of academic editors holds Science Robotics articles to the same high-quality standard that is the hallmark of the Science family of journals.
Sub-topics include: actuators, advanced materials, artificial Intelligence, autonomous vehicles, bio-inspired design, exoskeletons, fabrication, field robotics, human-robot interaction, humanoids, industrial robotics, kinematics, machine learning, material science, medical technology, motion planning and control, micro- and nano-robotics, multi-robot control, sensors, service robotics, social and ethical issues, soft robotics, and space, planetary and undersea exploration.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


