Bioinspired electronics for intelligent soft robots
引用次数: 0
Abstract
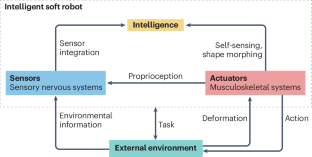
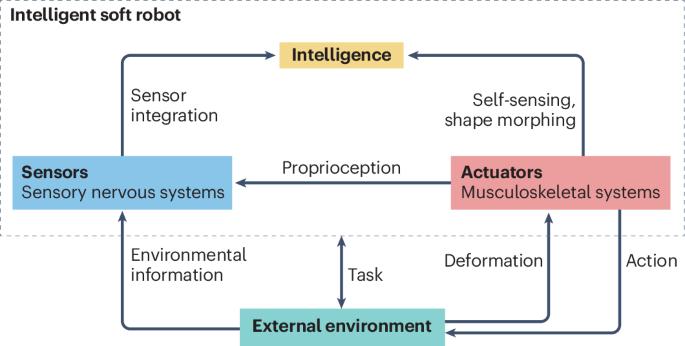
Soft robots, capable of safe interaction with delicate objects through their flexibility and compliance, are attracting attention in various real-world applications as manipulators, biomedical devices and wearable tools. As these technologies advance, the ability to perform complex tasks in a robust and reliable way becomes essential. Thus, the incorporation of embedded intelligence in soft robots, which enables them to perceive external environments and generate appropriate actions, is increasingly important. Inspiration from sophisticated biological systems, which exhibit optimized behaviours through the acquisition of external information, promotes the development of intelligent soft robots. Here, we introduce biomimicry strategies for intelligent soft robotics and highlight progress in how soft robots interact with their environment and perform tasks. First, we discuss sensors inspired by the sensory nervous systems and soft actuators inspired by the musculoskeletal systems. Furthermore, we investigate various applications such as manipulation, exploration, wearable devices, biomedical devices and imperceptible devices. We conclude discussing the challenges and offering a perspective on the future direction of this field. Soft robots are evolving to perform increasingly complex tasks, with biomimicry having a fundamental role in their development. This Review details biomimetic strategies and pivotal advances in sensors, actuators and applications of intelligent soft robotics.
用于智能软机器人的生物启发电子技术
软体机器人具有柔韧性和顺应性,能够与精密物体进行安全互动,在现实世界的各种应用中,软体机器人作为机械手、生物医学设备和可穿戴工具备受关注。随着这些技术的发展,以稳健可靠的方式执行复杂任务的能力变得至关重要。因此,在软体机器人中融入嵌入式智能,使其能够感知外部环境并产生适当的行动,就变得越来越重要。复杂的生物系统通过获取外部信息表现出最优化的行为,从这些系统中获得的灵感促进了智能软体机器人的发展。在此,我们将介绍智能软体机器人的仿生策略,并重点介绍软体机器人在与环境互动和执行任务方面取得的进展。首先,我们讨论了受感觉神经系统启发的传感器和受肌肉骨骼系统启发的软执行器。此外,我们还研究了各种应用,如操纵、探索、可穿戴设备、生物医学设备和不可感知设备。最后,我们讨论了这一领域所面临的挑战,并展望了这一领域的未来发展方向。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


