{"title":"Machine Learning-Based Prediction of Parking Space Availability in IoT-Enabled Smart Parking Management Systems","authors":"Anchal Dahiya, Pooja Mittal, Yogesh Kumar Sharma, Umesh Kumar Lilhore, Sarita Simaiya, Ehab Ghith, Mehdi Tlija","doi":"10.1155/2024/8474973","DOIUrl":null,"url":null,"abstract":"<div>\n <p>Parking space management has become a critical challenge in urban areas due to increasing vehicle numbers and limited parking infrastructure. This paper presents a comprehensive study of machine learning (ML) models in IoT-enabled environments focusing on proposing an ML-based model for predicting available parking space. The study evaluates the performance of various models including K-nearest neighbors (KNNs), support vector machines (SVMs), random forest (RF), decision tree (DT), logistic regression (LR), and Naïve Bayes (NB) based on “precision, recall, accuracy, and <i>F</i>1-score performance metrics”. The results obtained by implementing ML models on the data with 65% and 85% threshold values are compared to draw meaningful conclusions regarding their performance in predicting parking space availability. Among the evaluated models, random forest (RF) demonstrates superior performance with high precision, recall, accuracy, and <i>F</i>1-score values. It showcases its effectiveness in accurately predicting parking space availability in the IoT-enabled environment. On the other hand, models such as K-nearest neighbors (KNNs), decision tree (DT), logistic regression (LR), and Naïve Bayes (NB) show relatively lower performance in complex parking scenarios. The paper concludes that the use of advanced predictive models, particularly random forest, significantly enhances the accuracy and reliability of IoT-enabled parking management systems and also reduces the waiting time of the vehicles, leading to more efficient resource utilization, reduced traffic congestion in real-time scenarios, and better user satisfaction in the IoT-enabled environment.</p>\n </div>","PeriodicalId":50259,"journal":{"name":"Journal of Advanced Transportation","volume":"2024 1","pages":""},"PeriodicalIF":2.0000,"publicationDate":"2024-08-09","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1155/2024/8474973","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Advanced Transportation","FirstCategoryId":"5","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1155/2024/8474973","RegionNum":4,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"ENGINEERING, CIVIL","Score":null,"Total":0}
引用次数: 0
Abstract
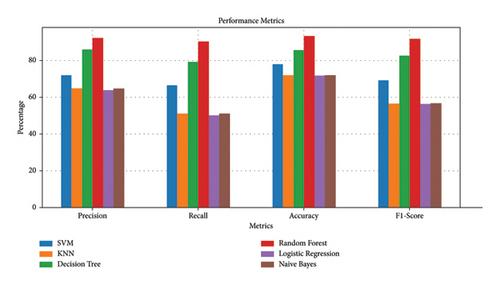
Parking space management has become a critical challenge in urban areas due to increasing vehicle numbers and limited parking infrastructure. This paper presents a comprehensive study of machine learning (ML) models in IoT-enabled environments focusing on proposing an ML-based model for predicting available parking space. The study evaluates the performance of various models including K-nearest neighbors (KNNs), support vector machines (SVMs), random forest (RF), decision tree (DT), logistic regression (LR), and Naïve Bayes (NB) based on “precision, recall, accuracy, and F1-score performance metrics”. The results obtained by implementing ML models on the data with 65% and 85% threshold values are compared to draw meaningful conclusions regarding their performance in predicting parking space availability. Among the evaluated models, random forest (RF) demonstrates superior performance with high precision, recall, accuracy, and F1-score values. It showcases its effectiveness in accurately predicting parking space availability in the IoT-enabled environment. On the other hand, models such as K-nearest neighbors (KNNs), decision tree (DT), logistic regression (LR), and Naïve Bayes (NB) show relatively lower performance in complex parking scenarios. The paper concludes that the use of advanced predictive models, particularly random forest, significantly enhances the accuracy and reliability of IoT-enabled parking management systems and also reduces the waiting time of the vehicles, leading to more efficient resource utilization, reduced traffic congestion in real-time scenarios, and better user satisfaction in the IoT-enabled environment.
由于车辆数量不断增加而停车基础设施有限,停车位管理已成为城市地区面临的一项严峻挑战。本文对物联网环境中的机器学习(ML)模型进行了全面研究,重点是提出一种基于 ML 的可用停车位预测模型。研究基于 "精确度、召回率、准确度和 F1 分数性能指标 "评估了各种模型的性能,包括 K 近邻(KNN)、支持向量机(SVM)、随机森林(RF)、决策树(DT)、逻辑回归(LR)和奈夫贝叶斯(NB)。通过比较在阈值为 65% 和 85% 的数据上实施 ML 模型所获得的结果,就这些模型在预测停车位可用性方面的性能得出了有意义的结论。在所评估的模型中,随机森林(RF)以较高的精确度、召回率、准确度和 F1 分数表现出卓越的性能。它展示了在物联网环境中准确预测停车位可用性的有效性。另一方面,K-近邻(KNN)、决策树(DT)、逻辑回归(LR)和奈夫贝叶斯(NB)等模型在复杂的停车场景中表现相对较差。本文的结论是,使用先进的预测模型,特别是随机森林,可显著提高物联网支持的停车管理系统的准确性和可靠性,还能减少车辆的等待时间,从而提高资源利用效率,减少实时场景下的交通拥堵,并提高物联网环境下的用户满意度。
期刊介绍:
The Journal of Advanced Transportation (JAT) is a fully peer reviewed international journal in transportation research areas related to public transit, road traffic, transport networks and air transport.
It publishes theoretical and innovative papers on analysis, design, operations, optimization and planning of multi-modal transport networks, transit & traffic systems, transport technology and traffic safety. Urban rail and bus systems, Pedestrian studies, traffic flow theory and control, Intelligent Transport Systems (ITS) and automated and/or connected vehicles are some topics of interest.
Highway engineering, railway engineering and logistics do not fall within the aims and scope of JAT.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


