Research on Intelligent Vehicle Operation Risk Assessment and Early Warning Based on Predictive Risk Field
Abstract
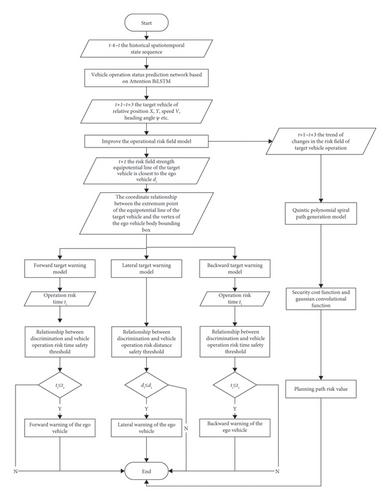
In order to enhance the driving safety of intelligent vehicles in complex road scenarios, a method for vehicle operation risk assessment and early warning based on the predictive risk field is proposed. The temporal feature vector composed of the spatiotemporal state characteristics of the ego vehicle and surrounding traffic participants is taken as input data for the Attention-Bidirectional Long-Short Term Memory (Attention-BiLSTM) model, which is trained to establish the desired mapping relationship. By predicting the motion state of the target vehicle and utilizing an improved risk field model based on the target vehicle of heading angle, the predictive risk field is obtained. This allows for the assessment of the ego vehicle operational risks. The risk warning model is integrated to provide risk early warning, and the safety path for the ego vehicle is planned based on the interaction between the predictive risk field equipotential lines and the cubic spline curves. Experimental results demonstrate that the proposed vehicle operation risk assessment and early warning model is effective in providing early warnings and safe path references for the ego vehicle in complex urban road test scenarios.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


