Lei Zhou , Shouxiang Jin , Jinpeng Wang , Huichun Zhang , Minghong Shi , HongPing Zhou
{"title":"3D positioning of Camellia oleifera fruit-grabbing points for robotic harvesting","authors":"Lei Zhou , Shouxiang Jin , Jinpeng Wang , Huichun Zhang , Minghong Shi , HongPing Zhou","doi":"10.1016/j.biosystemseng.2024.07.019","DOIUrl":null,"url":null,"abstract":"<div><p><em>Camellia oleifera</em> is an oilseed crop with high economic value. The short optimum harvest period and high labour costs of <em>C. oleifera</em> harvesting have prompted research on intelligent robotic harvesting. This study focused on the determination of grabbing points for the robotic harvesting of <em>C. oleifera</em> fruits, providing a basis for the decision making of the fruit-picking robot. A relatively simple 2D convolutional neural network (CNN) and stereoscopic vision replaced the complex 3D CNN to realise the 3D positioning of the fruit. Apple datasets were used for the pretraining of the model and knowledge transfer, which shared a certain degree of similarity to <em>C. oleifera</em> fruit. In addition, a fully automatic coordinate conversion method has been proposed to transform the fruit position information in the image into its 3D position in the robot coordinate system. Results showed that the You Only Look Once (YOLO)v8x model trained using 1012 annotated samples achieved the highest performance for fruit detection, with mAP<sub>50</sub> of 0.96 on the testing dataset. With knowledge transfer based on the apple datasets, YOLOv8x using few-shot learning realised a testing mAP<sub>50</sub> of 0.95, reducing manual annotation. Moreover, the error in the 3D coordinate calculation was lower than 2.1 cm on the three axes. The proposed method provides the 3D coordinates of the grabbing point for the target fruit in the robot coordinate system, which can be transferred directly to the robot control system to execute fruit-picking actions. This dataset was published online to reproduce the results of this study.</p></div>","PeriodicalId":9173,"journal":{"name":"Biosystems Engineering","volume":"246 ","pages":"Pages 110-121"},"PeriodicalIF":4.4000,"publicationDate":"2024-07-30","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Biosystems Engineering","FirstCategoryId":"97","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S1537511024001727","RegionNum":1,"RegionCategory":"农林科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"AGRICULTURAL ENGINEERING","Score":null,"Total":0}
引用次数: 0
Abstract
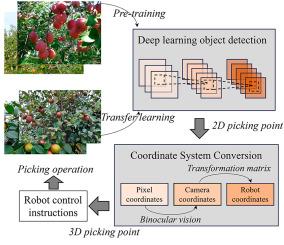
Camellia oleifera is an oilseed crop with high economic value. The short optimum harvest period and high labour costs of C. oleifera harvesting have prompted research on intelligent robotic harvesting. This study focused on the determination of grabbing points for the robotic harvesting of C. oleifera fruits, providing a basis for the decision making of the fruit-picking robot. A relatively simple 2D convolutional neural network (CNN) and stereoscopic vision replaced the complex 3D CNN to realise the 3D positioning of the fruit. Apple datasets were used for the pretraining of the model and knowledge transfer, which shared a certain degree of similarity to C. oleifera fruit. In addition, a fully automatic coordinate conversion method has been proposed to transform the fruit position information in the image into its 3D position in the robot coordinate system. Results showed that the You Only Look Once (YOLO)v8x model trained using 1012 annotated samples achieved the highest performance for fruit detection, with mAP50 of 0.96 on the testing dataset. With knowledge transfer based on the apple datasets, YOLOv8x using few-shot learning realised a testing mAP50 of 0.95, reducing manual annotation. Moreover, the error in the 3D coordinate calculation was lower than 2.1 cm on the three axes. The proposed method provides the 3D coordinates of the grabbing point for the target fruit in the robot coordinate system, which can be transferred directly to the robot control system to execute fruit-picking actions. This dataset was published online to reproduce the results of this study.
期刊介绍:
Biosystems Engineering publishes research in engineering and the physical sciences that represent advances in understanding or modelling of the performance of biological systems for sustainable developments in land use and the environment, agriculture and amenity, bioproduction processes and the food chain. The subject matter of the journal reflects the wide range and interdisciplinary nature of research in engineering for biological systems.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


