{"title":"Self-rotation-eversion of an anisotropic-friction-surface torus","authors":"Yunlong Qiu, Kai Li","doi":"10.1016/j.ijmecsci.2024.109584","DOIUrl":null,"url":null,"abstract":"<div><p>Recent experiments have revealed a new end-to-end ribbon spiral structure capable of demonstrating two interconnected periodic zero-energy-mode self-rotation-eversion in reaction to constant temperature or constant light sources, yet its fabrication is challenging due to its intricate nature. Differently, this paper develops a light-fueled self-rotating and everting liquid crystal elastomer torus on an isotropic frictional plane, by imparting anisotropic frictional properties to the surface of the torus. Based on a mature dynamic liquid crystal elastomer model, we constructed the theoretical model of the torus system. The torus is capable of absorbing the illumination energy to counteract damping dissipation and produce zero-energy-mode self-eversion-rotation. Theoretical findings demonstrate that the angular velocity of self-eversion is influenced by light intensity, light penetration depth, gravitational acceleration and anisotropic friction surface. Moreover, there is a proportional relationship between the self-rotation and self-eversion angular velocities, which is determined by the anisotropic frictional surface. The detailed criterion for the self-rotation direction is also established. Theoretical findings exhibit several similar phenomena to experimental observations. This paper proposes a new simple strategy that utilizes anisotropic friction surface to control self-eversion-rotation, which has guiding significance for the application of soft robots, active devices, and energy harvesters.</p></div>","PeriodicalId":56287,"journal":{"name":"International Journal of Mechanical Sciences","volume":"281 ","pages":"Article 109584"},"PeriodicalIF":7.1000,"publicationDate":"2024-07-22","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Journal of Mechanical Sciences","FirstCategoryId":"5","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0020740324006258","RegionNum":1,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, MECHANICAL","Score":null,"Total":0}
引用次数: 0
Abstract
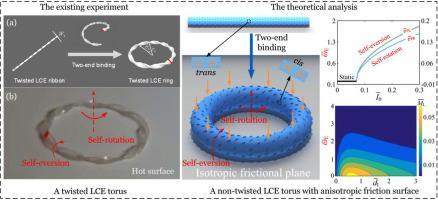
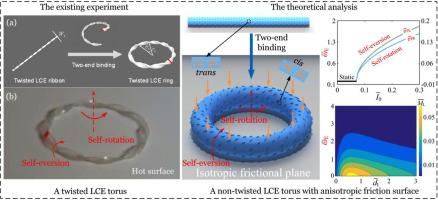
Recent experiments have revealed a new end-to-end ribbon spiral structure capable of demonstrating two interconnected periodic zero-energy-mode self-rotation-eversion in reaction to constant temperature or constant light sources, yet its fabrication is challenging due to its intricate nature. Differently, this paper develops a light-fueled self-rotating and everting liquid crystal elastomer torus on an isotropic frictional plane, by imparting anisotropic frictional properties to the surface of the torus. Based on a mature dynamic liquid crystal elastomer model, we constructed the theoretical model of the torus system. The torus is capable of absorbing the illumination energy to counteract damping dissipation and produce zero-energy-mode self-eversion-rotation. Theoretical findings demonstrate that the angular velocity of self-eversion is influenced by light intensity, light penetration depth, gravitational acceleration and anisotropic friction surface. Moreover, there is a proportional relationship between the self-rotation and self-eversion angular velocities, which is determined by the anisotropic frictional surface. The detailed criterion for the self-rotation direction is also established. Theoretical findings exhibit several similar phenomena to experimental observations. This paper proposes a new simple strategy that utilizes anisotropic friction surface to control self-eversion-rotation, which has guiding significance for the application of soft robots, active devices, and energy harvesters.
期刊介绍:
The International Journal of Mechanical Sciences (IJMS) serves as a global platform for the publication and dissemination of original research that contributes to a deeper scientific understanding of the fundamental disciplines within mechanical, civil, and material engineering.
The primary focus of IJMS is to showcase innovative and ground-breaking work that utilizes analytical and computational modeling techniques, such as Finite Element Method (FEM), Boundary Element Method (BEM), and mesh-free methods, among others. These modeling methods are applied to diverse fields including rigid-body mechanics (e.g., dynamics, vibration, stability), structural mechanics, metal forming, advanced materials (e.g., metals, composites, cellular, smart) behavior and applications, impact mechanics, strain localization, and other nonlinear effects (e.g., large deflections, plasticity, fracture).
Additionally, IJMS covers the realms of fluid mechanics (both external and internal flows), tribology, thermodynamics, and materials processing. These subjects collectively form the core of the journal's content.
In summary, IJMS provides a prestigious platform for researchers to present their original contributions, shedding light on analytical and computational modeling methods in various areas of mechanical engineering, as well as exploring the behavior and application of advanced materials, fluid mechanics, thermodynamics, and materials processing.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


