Searching for a Sub-Optimal Solution of the Dynamic Traveling Salesman Problem Using the Monte Carlo Method
IF 0.6
4区 计算机科学
Q4 AUTOMATION & CONTROL SYSTEMS
引用次数: 0
Abstract
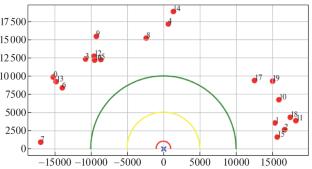
The problem of drawing up a bypass plan for targets moving rectilinearly to one point for simple movements of an interceptor (traveling salesman) is considered. A new criterion of the problem is proposed based on the initial partition of the possible intercept area, as well as an algorithm for finding a sub-optimal bypass plan based on the construction of a solution search tree by the Monte Carlo method. A numerical implementation of the algorithm has been developed, modeling has been carried out and the obtained plans for bypassing targets have been statistically analyzed.
用蒙特卡罗方法寻找动态旅行推销员问题的次最优解
摘要 考虑了为截击机(巡回推销员)的简单运动直线向一点移动的目标制定绕行计划的问题。根据可能拦截区域的初始划分,提出了问题的新标准,并提出了一种基于蒙特卡洛法构建解搜索树的次优绕行计划算法。已开发出该算法的数值实现方法,并进行了建模,对所获得的绕过目标的计划进行了统计分析。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

Automation and Remote Control
工程技术-仪器仪表
CiteScore
1.70
自引率
28.60%
发文量
90
审稿时长
3-8 weeks
期刊介绍:
Automation and Remote Control is one of the first journals on control theory. The scope of the journal is control theory problems and applications. The journal publishes reviews, original articles, and short communications (deterministic, stochastic, adaptive, and robust formulations) and its applications (computer control, components and instruments, process control, social and economy control, etc.).
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


