{"title":"Shape-position perceptive fusion electronic skin with autonomous learning for gesture interaction","authors":"Qian Wang, Mingming Li, Pingping Guo, Liang Gao, Ling Weng, Wenmei Huang","doi":"10.1038/s41378-024-00739-9","DOIUrl":null,"url":null,"abstract":"<p>Wearable devices, such as data gloves and electronic skins, can perceive human instructions, behaviors and even emotions by tracking a hand's motion, with the help of knowledge learning. The shape or position single-mode sensor in such devices often lacks comprehensive information to perceive interactive gestures. Meanwhile, the limited computing power of wearable applications restricts the multimode fusion of different sensing data and the deployment of deep learning networks. We propose a perceptive fusion electronic skin (PFES) with a bioinspired hierarchical structure that utilizes the magnetization state of a magnetostrictive alloy film to be sensitive to external strain or magnetic field. Installed at the joints of a hand, the PFES realizes perception of curvature (joint shape) and magnetism (joint position) information by mapping corresponding signals to the two-directional continuous distribution such that the two edges represent the contributions of curvature radius and magnetic field, respectively. By autonomously selecting knowledge closer to the user's hand movement characteristics, the reinforced knowledge distillation method is developed to learn and compress a teacher model for rapid deployment on wearable devices. The PFES integrating the autonomous learning algorithm can fuse curvature-magnetism dual information, ultimately achieving human machine interaction with gesture recognition and haptic feedback for cross-space perception and manipulation.</p><figure></figure>","PeriodicalId":18560,"journal":{"name":"Microsystems & Nanoengineering","volume":"42 1","pages":""},"PeriodicalIF":7.3000,"publicationDate":"2024-07-22","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Microsystems & Nanoengineering","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.1038/s41378-024-00739-9","RegionNum":1,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"INSTRUMENTS & INSTRUMENTATION","Score":null,"Total":0}
引用次数: 0
Abstract
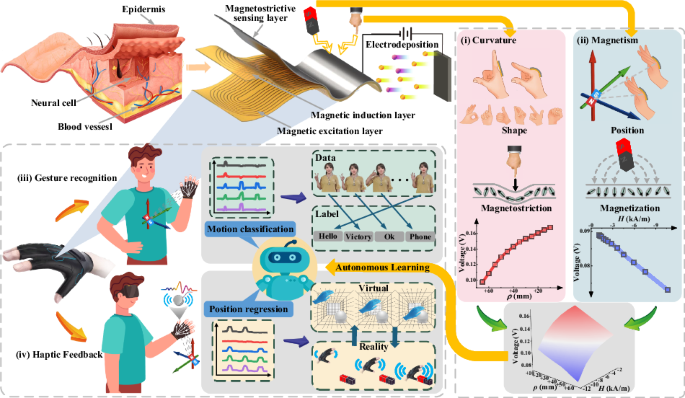
Wearable devices, such as data gloves and electronic skins, can perceive human instructions, behaviors and even emotions by tracking a hand's motion, with the help of knowledge learning. The shape or position single-mode sensor in such devices often lacks comprehensive information to perceive interactive gestures. Meanwhile, the limited computing power of wearable applications restricts the multimode fusion of different sensing data and the deployment of deep learning networks. We propose a perceptive fusion electronic skin (PFES) with a bioinspired hierarchical structure that utilizes the magnetization state of a magnetostrictive alloy film to be sensitive to external strain or magnetic field. Installed at the joints of a hand, the PFES realizes perception of curvature (joint shape) and magnetism (joint position) information by mapping corresponding signals to the two-directional continuous distribution such that the two edges represent the contributions of curvature radius and magnetic field, respectively. By autonomously selecting knowledge closer to the user's hand movement characteristics, the reinforced knowledge distillation method is developed to learn and compress a teacher model for rapid deployment on wearable devices. The PFES integrating the autonomous learning algorithm can fuse curvature-magnetism dual information, ultimately achieving human machine interaction with gesture recognition and haptic feedback for cross-space perception and manipulation.
期刊介绍:
Microsystems & Nanoengineering is a comprehensive online journal that focuses on the field of Micro and Nano Electro Mechanical Systems (MEMS and NEMS). It provides a platform for researchers to share their original research findings and review articles in this area. The journal covers a wide range of topics, from fundamental research to practical applications. Published by Springer Nature, in collaboration with the Aerospace Information Research Institute, Chinese Academy of Sciences, and with the support of the State Key Laboratory of Transducer Technology, it is an esteemed publication in the field. As an open access journal, it offers free access to its content, allowing readers from around the world to benefit from the latest developments in MEMS and NEMS.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


