Michio Kawai, Minghao Nie, Haruka Oda, Shoji Takeuchi
{"title":"Perforation-type anchors inspired by skin ligament for robotic face covered with living skin","authors":"Michio Kawai, Minghao Nie, Haruka Oda, Shoji Takeuchi","doi":"10.1016/j.xcrp.2024.102066","DOIUrl":null,"url":null,"abstract":"<p>Skin equivalent, a living skin model composed of cells and extracellular matrix, possesses the potential to be an ideal covering material for robots due to its biological functionalities. To employ skin equivalents as covering materials for robots, a secure method for attaching them to the underlying structure is required. In this study, we develop and characterize perforation-type anchors inspired by the structure of skin ligaments as a technique to effectively adhere skin equivalents to robotic surfaces. To showcase the versatility of perforation-type anchors in three-dimensional (3D) coverage applications, we cover a 3D facial mold with intricate surface structure with skin equivalent using perforation-type anchors. Furthermore, we construct a robotic face covered with dermis equivalent, capable of expressing smiles, with actuation through perforation-type anchors. With the above results, this research introduces an approach to adhere and actuate skin equivalents with perforation-type anchors, potentially contributing to advancements in biohybrid robotics.</p>","PeriodicalId":9703,"journal":{"name":"Cell Reports Physical Science","volume":null,"pages":null},"PeriodicalIF":7.9000,"publicationDate":"2024-06-25","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Cell Reports Physical Science","FirstCategoryId":"103","ListUrlMain":"https://doi.org/10.1016/j.xcrp.2024.102066","RegionNum":2,"RegionCategory":"综合性期刊","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"CHEMISTRY, MULTIDISCIPLINARY","Score":null,"Total":0}
引用次数: 0
Abstract
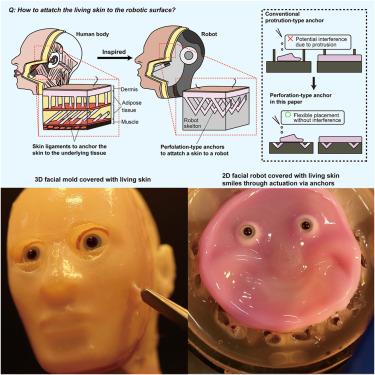
Skin equivalent, a living skin model composed of cells and extracellular matrix, possesses the potential to be an ideal covering material for robots due to its biological functionalities. To employ skin equivalents as covering materials for robots, a secure method for attaching them to the underlying structure is required. In this study, we develop and characterize perforation-type anchors inspired by the structure of skin ligaments as a technique to effectively adhere skin equivalents to robotic surfaces. To showcase the versatility of perforation-type anchors in three-dimensional (3D) coverage applications, we cover a 3D facial mold with intricate surface structure with skin equivalent using perforation-type anchors. Furthermore, we construct a robotic face covered with dermis equivalent, capable of expressing smiles, with actuation through perforation-type anchors. With the above results, this research introduces an approach to adhere and actuate skin equivalents with perforation-type anchors, potentially contributing to advancements in biohybrid robotics.
期刊介绍:
Cell Reports Physical Science, a premium open-access journal from Cell Press, features high-quality, cutting-edge research spanning the physical sciences. It serves as an open forum fostering collaboration among physical scientists while championing open science principles. Published works must signify significant advancements in fundamental insight or technological applications within fields such as chemistry, physics, materials science, energy science, engineering, and related interdisciplinary studies. In addition to longer articles, the journal considers impactful short-form reports and short reviews covering recent literature in emerging fields. Continually adapting to the evolving open science landscape, the journal reviews its policies to align with community consensus and best practices.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


