{"title":"The Chaos Sparrow Search Algorithm: Multi-layer and Multi-pass Welding Robot Trajectory Optimization for Medium and Thick Plates","authors":"Song Mu, Jianyong Wang, Chunyang Mu","doi":"10.1007/s42235-024-00556-w","DOIUrl":null,"url":null,"abstract":"<div><p>The welding of medium and thick plates has a wide range of applications in the engineering field. Industrial welding robots are gradually replacing traditional welding operations due to their significant advantages, such as high welding quality, high work efficiency, and effective reduction of labor intensity. Ensuring the accuracy of the welding trajectory for the welding robot is crucial for guaranteeing welding quality. In this paper, the author uses the chaos sparrow search algorithm to optimize the trajectory of a multi-layer and multi-pass welding robot for medium and thick plates. Firstly, the Sparrow Search Algorithm (SSA) is improved by introducing tent chaotic mapping and Gaussian mutation of the inertia weight factor. Secondly, in order to prevent the welding robot arm from colliding with obstacles in the welding environment during the welding process, maintain the stability of the welding robot, and ensure the continuous stability of the changes in each joint angle, joint angular velocity, and angular velocity of the joint angle, a welding robot model is established by improving the Denavit–Hartenberg parameter method. A multi-objective optimization fitness function is used to optimize the trajectory of the welding robot, minimizing time and energy consumption. Thirdly, the optimization and convergence performance of SSA and Chaos Sparrow Search Algorithm (CSSA) are compared through 10 benchmark test functions. Based on the six sets of test functions, the CSSA algorithm consistently maintains superior optimization performance and has excellent stability, with a faster decline in the convergence curve compared to the SSA algorithm. Finally, the accuracy of welding is tested through V-shaped multi-layer and multi-pass welding experiments. The experimental results show that the CSSA algorithm has a strong superiority in trajectory optimization of multi-layer and multi-pass welding for medium and thick plates, with an accuracy rate of 99.5%. It is an effective optimization method that can meet the actual needs of production.</p></div>","PeriodicalId":614,"journal":{"name":"Journal of Bionic Engineering","volume":"21 5","pages":"2602 - 2618"},"PeriodicalIF":4.9000,"publicationDate":"2024-06-17","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Bionic Engineering","FirstCategoryId":"94","ListUrlMain":"https://link.springer.com/article/10.1007/s42235-024-00556-w","RegionNum":3,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, MULTIDISCIPLINARY","Score":null,"Total":0}
引用次数: 0
Abstract
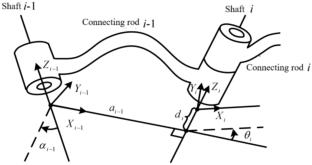
The welding of medium and thick plates has a wide range of applications in the engineering field. Industrial welding robots are gradually replacing traditional welding operations due to their significant advantages, such as high welding quality, high work efficiency, and effective reduction of labor intensity. Ensuring the accuracy of the welding trajectory for the welding robot is crucial for guaranteeing welding quality. In this paper, the author uses the chaos sparrow search algorithm to optimize the trajectory of a multi-layer and multi-pass welding robot for medium and thick plates. Firstly, the Sparrow Search Algorithm (SSA) is improved by introducing tent chaotic mapping and Gaussian mutation of the inertia weight factor. Secondly, in order to prevent the welding robot arm from colliding with obstacles in the welding environment during the welding process, maintain the stability of the welding robot, and ensure the continuous stability of the changes in each joint angle, joint angular velocity, and angular velocity of the joint angle, a welding robot model is established by improving the Denavit–Hartenberg parameter method. A multi-objective optimization fitness function is used to optimize the trajectory of the welding robot, minimizing time and energy consumption. Thirdly, the optimization and convergence performance of SSA and Chaos Sparrow Search Algorithm (CSSA) are compared through 10 benchmark test functions. Based on the six sets of test functions, the CSSA algorithm consistently maintains superior optimization performance and has excellent stability, with a faster decline in the convergence curve compared to the SSA algorithm. Finally, the accuracy of welding is tested through V-shaped multi-layer and multi-pass welding experiments. The experimental results show that the CSSA algorithm has a strong superiority in trajectory optimization of multi-layer and multi-pass welding for medium and thick plates, with an accuracy rate of 99.5%. It is an effective optimization method that can meet the actual needs of production.
期刊介绍:
The Journal of Bionic Engineering (JBE) is a peer-reviewed journal that publishes original research papers and reviews that apply the knowledge learned from nature and biological systems to solve concrete engineering problems. The topics that JBE covers include but are not limited to:
Mechanisms, kinematical mechanics and control of animal locomotion, development of mobile robots with walking (running and crawling), swimming or flying abilities inspired by animal locomotion.
Structures, morphologies, composition and physical properties of natural and biomaterials; fabrication of new materials mimicking the properties and functions of natural and biomaterials.
Biomedical materials, artificial organs and tissue engineering for medical applications; rehabilitation equipment and devices.
Development of bioinspired computation methods and artificial intelligence for engineering applications.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


