Erkin Gezgin, Alp E. Yaşar, Tuğrul Uslu, Mertcan Koçak, Didem Güzin, Seda Özbek, Gökmen A. Türkmen, Goncagül Karayaman, Rahime Alsanğur, Barış Bıdıklı, Fatih C. Can, Levent Çetin
{"title":"On the design of a macro-micro parallel manipulator for cochlear microrobot operations","authors":"Erkin Gezgin, Alp E. Yaşar, Tuğrul Uslu, Mertcan Koçak, Didem Güzin, Seda Özbek, Gökmen A. Türkmen, Goncagül Karayaman, Rahime Alsanğur, Barış Bıdıklı, Fatih C. Can, Levent Çetin","doi":"10.1002/rcs.2654","DOIUrl":null,"url":null,"abstract":"<div>\n \n \n <section>\n \n <h3> Background</h3>\n \n <p>The method of stem cell transfer to narrow cochlear canals in vivo to generate hair cells is still an unclear operation. Thus, the development of any possible method that will ensure the usage of medical microrobots in small cochlear workspaces is a challenging procedure.</p>\n </section>\n \n <section>\n \n <h3> Methods</h3>\n \n <p>The current study tries to introduce a macro-micro manipulator system composed of a 6-DoF industrial serial manipulator as a macro manipulator and a proposed 5-DoF parallel manipulator with dual end effectors as a micro manipulator carrying permanent magnets for tetherless microrobot actuation inside the cochlea.</p>\n </section>\n \n <section>\n \n <h3> Results</h3>\n \n <p>Throughout the study, structural synthesis and kinematic analysis of the proposed micro manipulator were introduced. A prototype of the manipulator was manufactured and its hardware verification procedures were carried out using motion capture cameras and surgical navigation registration methodologies.</p>\n </section>\n \n <section>\n \n <h3> Conclusions</h3>\n \n <p>Following motion training, the assembled macro-micro manipulator was successfully utilised to actuate a microrobot placed inside a manufactured cochlea mockup model.</p>\n </section>\n </div>","PeriodicalId":50311,"journal":{"name":"International Journal of Medical Robotics and Computer Assisted Surgery","volume":"20 4","pages":""},"PeriodicalIF":2.3000,"publicationDate":"2024-06-28","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1002/rcs.2654","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Journal of Medical Robotics and Computer Assisted Surgery","FirstCategoryId":"3","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1002/rcs.2654","RegionNum":3,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"SURGERY","Score":null,"Total":0}
引用次数: 0
Abstract
Background
The method of stem cell transfer to narrow cochlear canals in vivo to generate hair cells is still an unclear operation. Thus, the development of any possible method that will ensure the usage of medical microrobots in small cochlear workspaces is a challenging procedure.
Methods
The current study tries to introduce a macro-micro manipulator system composed of a 6-DoF industrial serial manipulator as a macro manipulator and a proposed 5-DoF parallel manipulator with dual end effectors as a micro manipulator carrying permanent magnets for tetherless microrobot actuation inside the cochlea.
Results
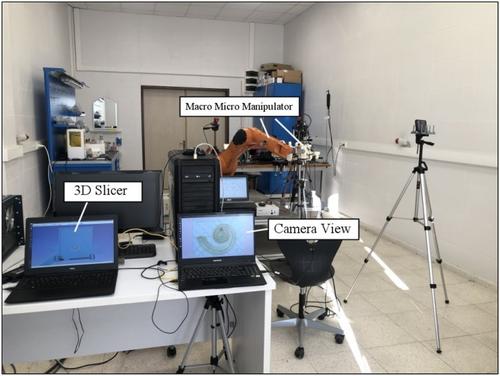
Throughout the study, structural synthesis and kinematic analysis of the proposed micro manipulator were introduced. A prototype of the manipulator was manufactured and its hardware verification procedures were carried out using motion capture cameras and surgical navigation registration methodologies.
Conclusions
Following motion training, the assembled macro-micro manipulator was successfully utilised to actuate a microrobot placed inside a manufactured cochlea mockup model.
期刊介绍:
The International Journal of Medical Robotics and Computer Assisted Surgery provides a cross-disciplinary platform for presenting the latest developments in robotics and computer assisted technologies for medical applications. The journal publishes cutting-edge papers and expert reviews, complemented by commentaries, correspondence and conference highlights that stimulate discussion and exchange of ideas. Areas of interest include robotic surgery aids and systems, operative planning tools, medical imaging and visualisation, simulation and navigation, virtual reality, intuitive command and control systems, haptics and sensor technologies. In addition to research and surgical planning studies, the journal welcomes papers detailing clinical trials and applications of computer-assisted workflows and robotic systems in neurosurgery, urology, paediatric, orthopaedic, craniofacial, cardiovascular, thoraco-abdominal, musculoskeletal and visceral surgery. Articles providing critical analysis of clinical trials, assessment of the benefits and risks of the application of these technologies, commenting on ease of use, or addressing surgical education and training issues are also encouraged. The journal aims to foster a community that encompasses medical practitioners, researchers, and engineers and computer scientists developing robotic systems and computational tools in academic and commercial environments, with the intention of promoting and developing these exciting areas of medical technology.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


