Anand K. Mishra, Nicholas E. Russo, Hyeon Seok An, Constantinos L. Zekios, Stavros V. Georgakopoulos, Robert F. Shepherd
{"title":"Robotic Antennas Using Liquid Metal Origami","authors":"Anand K. Mishra, Nicholas E. Russo, Hyeon Seok An, Constantinos L. Zekios, Stavros V. Georgakopoulos, Robert F. Shepherd","doi":"10.1002/aisy.202400190","DOIUrl":null,"url":null,"abstract":"<p>Two of the main challenges in origami antenna designs are creating a reliable hinge and achieving precise actuation for optimal electromagnetic (EM) performance. Herein, a waterbomb origami ring antenna is introduced, integrating the waterbomb origami principle, 3D-printed liquid metal (LM) hinges, and robotic shape morphing. The approach, combining 3D printing, robotic actuation, and innovative antenna design, enables various origami folding patterns, enhancing both portability and EM performance. This antenna's functionality has been successfully demonstrated, displaying its communication capabilities with another antenna and its ability to navigate narrow spaces on a remote-controlled wheel robot. The 3D-printed LM hinge exhibits low DC resistance (200 ± 1.6 mΩ) at both flat and folded state, and, with robotic control, the antenna achieves less than 1° folding angle accuracy and a 66% folding area ratio. The antenna operates in two modes at 2.08 and 2.4 GHz, ideal for fixed mobile use and radiolocation. Through extensive simulations and experiments, the antenna is evaluated in both flat and folded states, focusing on resonant frequency, gain patterns, and hinge connectivity. The findings confirm that the waterbomb origami ring antenna consistently maintains EM performance during folding and unfolding, with stable resonant frequencies and gain patterns, proving the antenna's reliability and adaptability for use in portable and mobile devices.</p>","PeriodicalId":93858,"journal":{"name":"Advanced intelligent systems (Weinheim an der Bergstrasse, Germany)","volume":"6 8","pages":""},"PeriodicalIF":6.8000,"publicationDate":"2024-06-12","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1002/aisy.202400190","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Advanced intelligent systems (Weinheim an der Bergstrasse, Germany)","FirstCategoryId":"1085","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1002/aisy.202400190","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"AUTOMATION & CONTROL SYSTEMS","Score":null,"Total":0}
引用次数: 0
Abstract
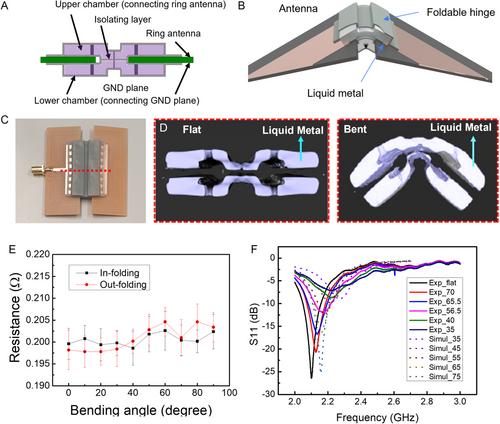
Two of the main challenges in origami antenna designs are creating a reliable hinge and achieving precise actuation for optimal electromagnetic (EM) performance. Herein, a waterbomb origami ring antenna is introduced, integrating the waterbomb origami principle, 3D-printed liquid metal (LM) hinges, and robotic shape morphing. The approach, combining 3D printing, robotic actuation, and innovative antenna design, enables various origami folding patterns, enhancing both portability and EM performance. This antenna's functionality has been successfully demonstrated, displaying its communication capabilities with another antenna and its ability to navigate narrow spaces on a remote-controlled wheel robot. The 3D-printed LM hinge exhibits low DC resistance (200 ± 1.6 mΩ) at both flat and folded state, and, with robotic control, the antenna achieves less than 1° folding angle accuracy and a 66% folding area ratio. The antenna operates in two modes at 2.08 and 2.4 GHz, ideal for fixed mobile use and radiolocation. Through extensive simulations and experiments, the antenna is evaluated in both flat and folded states, focusing on resonant frequency, gain patterns, and hinge connectivity. The findings confirm that the waterbomb origami ring antenna consistently maintains EM performance during folding and unfolding, with stable resonant frequencies and gain patterns, proving the antenna's reliability and adaptability for use in portable and mobile devices.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


