Experiment-free exoskeleton assistance via learning in simulation
IF 50.5
1区 综合性期刊
Q1 MULTIDISCIPLINARY SCIENCES
引用次数: 0
Abstract
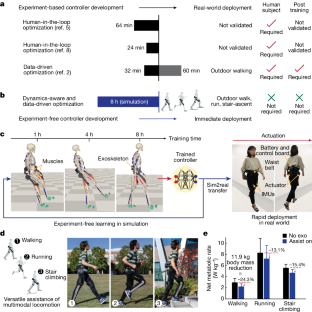
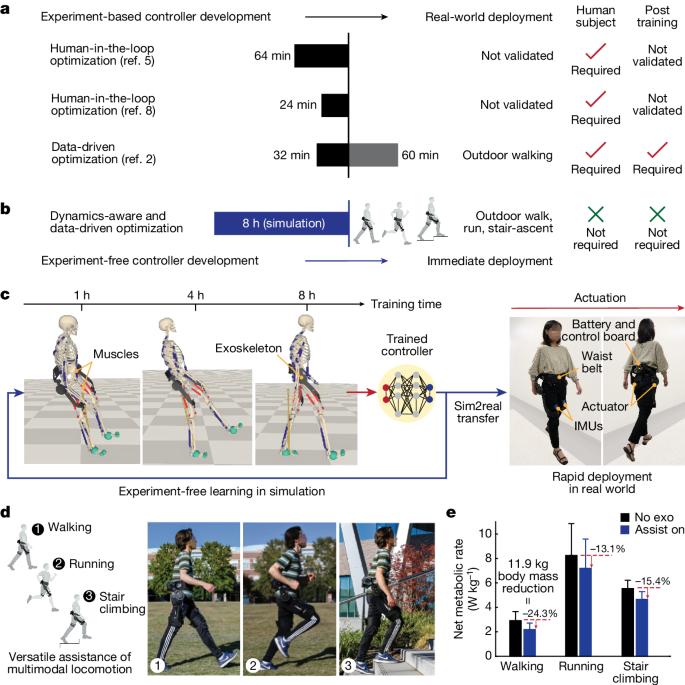
Exoskeletons have enormous potential to improve human locomotive performance1–3. However, their development and broad dissemination are limited by the requirement for lengthy human tests and handcrafted control laws2. Here we show an experiment-free method to learn a versatile control policy in simulation. Our learning-in-simulation framework leverages dynamics-aware musculoskeletal and exoskeleton models and data-driven reinforcement learning to bridge the gap between simulation and reality without human experiments. The learned controller is deployed on a custom hip exoskeleton that automatically generates assistance across different activities with reduced metabolic rates by 24.3%, 13.1% and 15.4% for walking, running and stair climbing, respectively. Our framework may offer a generalizable and scalable strategy for the rapid development and widespread adoption of a variety of assistive robots for both able-bodied and mobility-impaired individuals. A learning-in-simulation framework for wearable robots uses dynamics-aware musculoskeletal and exoskeleton models and data-driven reinforcement learning to bridge the gap between simulation and reality without human experiments to assist versatile activities.
通过模拟学习实现免实验外骨骼辅助。
外骨骼在提高人类机车性能方面潜力巨大1-3。然而,由于需要长时间的人体试验和手工制定控制法则,外骨骼的发展和广泛推广受到了限制2。在这里,我们展示了一种在模拟中学习多功能控制策略的免实验方法。我们的仿真学习框架利用动态感知的肌肉骨骼和外骨骼模型以及数据驱动的强化学习来弥合仿真与现实之间的差距,而无需进行人体实验。将学习到的控制器部署在定制的髋关节外骨骼上,可在不同的活动中自动产生帮助,在行走、跑步和爬楼梯时,代谢率分别降低了 24.3%、13.1% 和 15.4%。我们的框架可以提供一种可推广和可扩展的策略,用于快速开发和广泛采用各种辅助机器人,既适用于健全人,也适用于行动不便的人。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

Nature
综合性期刊-综合性期刊
CiteScore
90.00
自引率
1.20%
发文量
3652
审稿时长
3 months
期刊介绍:
Nature is a prestigious international journal that publishes peer-reviewed research in various scientific and technological fields. The selection of articles is based on criteria such as originality, importance, interdisciplinary relevance, timeliness, accessibility, elegance, and surprising conclusions. In addition to showcasing significant scientific advances, Nature delivers rapid, authoritative, insightful news, and interpretation of current and upcoming trends impacting science, scientists, and the broader public. The journal serves a dual purpose: firstly, to promptly share noteworthy scientific advances and foster discussions among scientists, and secondly, to ensure the swift dissemination of scientific results globally, emphasizing their significance for knowledge, culture, and daily life.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


