Lin Ai, Shukun Yin, Weixia He, Peidong Zhang, Yang Li
{"title":"Easy-to-actuate multi-compatible truss structures with prescribed reconfiguration.","authors":"Lin Ai, Shukun Yin, Weixia He, Peidong Zhang, Yang Li","doi":"10.1038/s41467-024-49210-3","DOIUrl":null,"url":null,"abstract":"<p><p>Multi-stable structures attract great interest because they possess special energy landscapes with domains of attraction around the stable states. Consequently, multi-stable structures have the potential to achieve prescribed reconfiguration with only a few lightweight actuators (such as shape-memory alloy springs), and do not need constant actuation to be locked at a stable state. However, most existing multi-stability designs are based on assembling bi-stable unit cells, which contain multitudes of distractive stable states, diminishing the feasibility of reconfiguration actuation. Another type is by introducing prestress together with kinematic symmetry or nonlinearity to achieve multi-stability, but the resultant structure often suffers the lack of stiffness. To help address these challenges, we firstly introduce the constraints that a truss structure is simultaneously compatible at multiple (more than two) prescribed states. Then, we solve for the design of multi-stable truss structures, named multi-compatible structures in this paper, where redundant stable states are limited. Secondly, we explore minimum energy paths connecting the designed stable states, and compute for a simple and inaccurate pulling actuation guiding the structure to transform along the computed paths. Finally, we fabricated four prototypes to demonstrate that prescribed reconfigurations with easy-actuation have been achieved and applied a quadra-stable structure to the design of a variable stiffness gripper. Altogether, our full-cycle design approach contains multi-stability design, stiffness design, minimum-energy-path finding, and pulling actuation design, which highlights the potential for designing morphing structures with lightweight actuation for practical applications.</p>","PeriodicalId":19066,"journal":{"name":"Nature Communications","volume":null,"pages":null},"PeriodicalIF":14.7000,"publicationDate":"2024-06-07","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11161661/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Nature Communications","FirstCategoryId":"103","ListUrlMain":"https://doi.org/10.1038/s41467-024-49210-3","RegionNum":1,"RegionCategory":"综合性期刊","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"MULTIDISCIPLINARY SCIENCES","Score":null,"Total":0}
引用次数: 0
Abstract
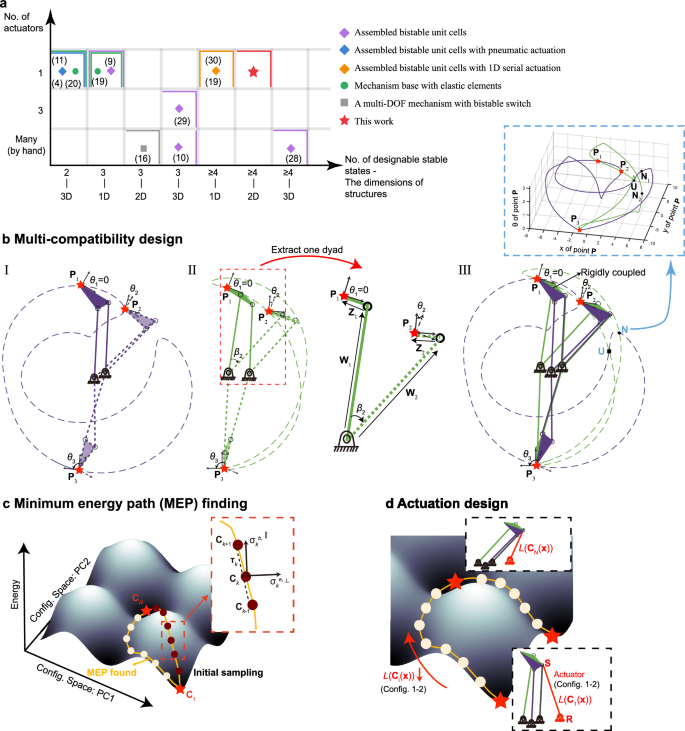
Multi-stable structures attract great interest because they possess special energy landscapes with domains of attraction around the stable states. Consequently, multi-stable structures have the potential to achieve prescribed reconfiguration with only a few lightweight actuators (such as shape-memory alloy springs), and do not need constant actuation to be locked at a stable state. However, most existing multi-stability designs are based on assembling bi-stable unit cells, which contain multitudes of distractive stable states, diminishing the feasibility of reconfiguration actuation. Another type is by introducing prestress together with kinematic symmetry or nonlinearity to achieve multi-stability, but the resultant structure often suffers the lack of stiffness. To help address these challenges, we firstly introduce the constraints that a truss structure is simultaneously compatible at multiple (more than two) prescribed states. Then, we solve for the design of multi-stable truss structures, named multi-compatible structures in this paper, where redundant stable states are limited. Secondly, we explore minimum energy paths connecting the designed stable states, and compute for a simple and inaccurate pulling actuation guiding the structure to transform along the computed paths. Finally, we fabricated four prototypes to demonstrate that prescribed reconfigurations with easy-actuation have been achieved and applied a quadra-stable structure to the design of a variable stiffness gripper. Altogether, our full-cycle design approach contains multi-stability design, stiffness design, minimum-energy-path finding, and pulling actuation design, which highlights the potential for designing morphing structures with lightweight actuation for practical applications.
期刊介绍:
Nature Communications, an open-access journal, publishes high-quality research spanning all areas of the natural sciences. Papers featured in the journal showcase significant advances relevant to specialists in each respective field. With a 2-year impact factor of 16.6 (2022) and a median time of 8 days from submission to the first editorial decision, Nature Communications is committed to rapid dissemination of research findings. As a multidisciplinary journal, it welcomes contributions from biological, health, physical, chemical, Earth, social, mathematical, applied, and engineering sciences, aiming to highlight important breakthroughs within each domain.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


