Closed-loop optogenetic neuromodulation enables high-fidelity fatigue-resistant muscle control
IF 26.1
1区 计算机科学
Q1 ROBOTICS
引用次数: 0
Abstract
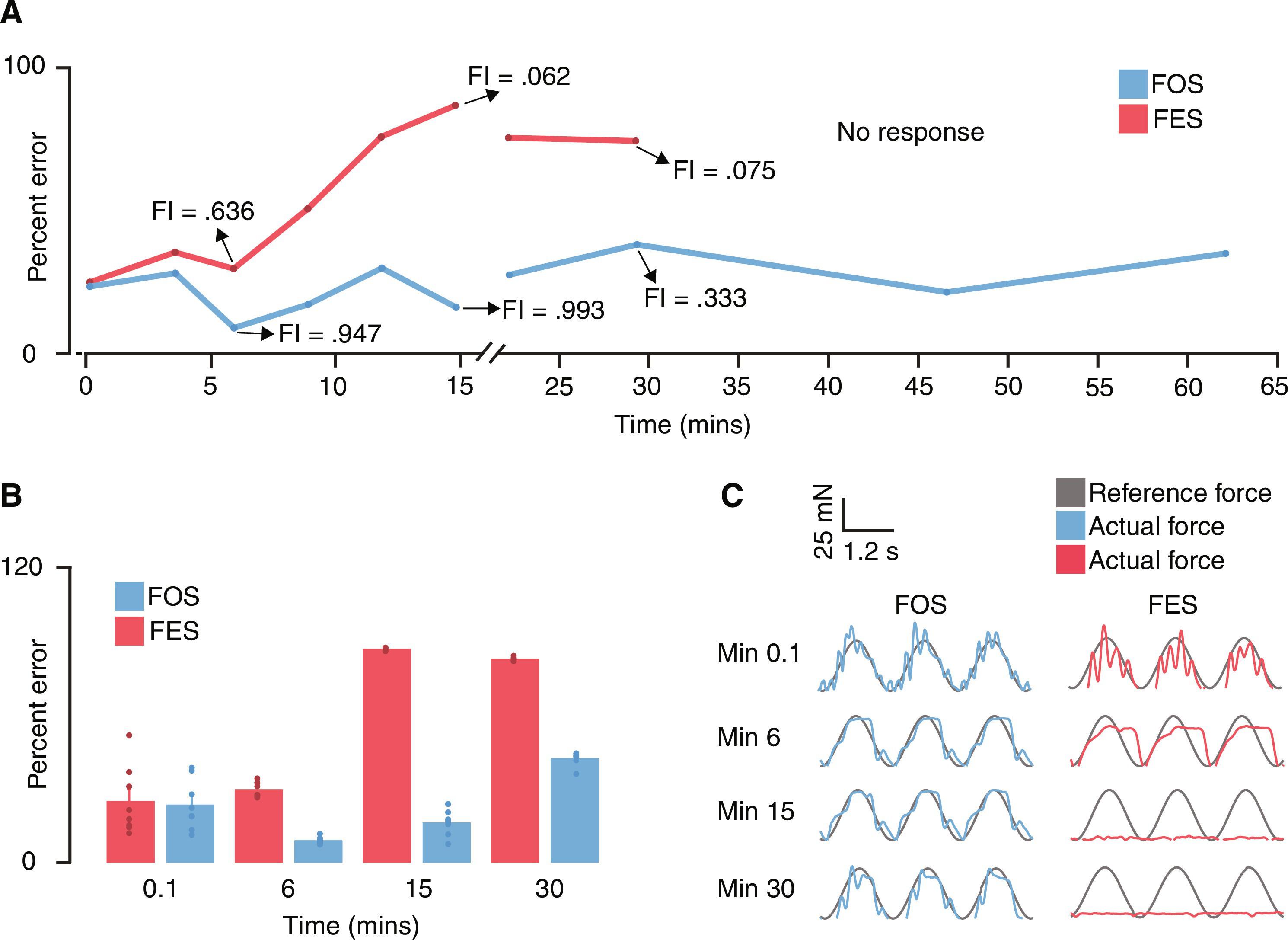
Closed-loop neuroprostheses show promise in restoring motion in individuals with neurological conditions. However, conventional activation strategies based on functional electrical stimulation (FES) fail to accurately modulate muscle force and exhibit rapid fatigue because of their unphysiological recruitment mechanism. Here, we present a closed-loop control framework that leverages physiological force modulation under functional optogenetic stimulation (FOS) to enable high-fidelity muscle control for extended periods of time (>60 minutes) in vivo. We first uncovered the force modulation characteristic of FOS, showing more physiological recruitment and significantly higher modulation ranges (>320%) compared with FES. Second, we developed a neuromuscular model that accurately describes the highly nonlinear dynamics of optogenetically stimulated muscle. Third, on the basis of the optogenetic model, we demonstrated real-time control of muscle force with improved performance and fatigue resistance compared with FES. This work lays the foundation for fatigue-resistant neuroprostheses and optogenetically controlled biohybrid robots with high-fidelity force modulation.
闭环光遗传学神经调节实现了高保真抗疲劳肌肉控制。
闭环神经假体有望恢复神经系统疾病患者的运动能力。然而,基于功能性电刺激(FES)的传统激活策略无法准确调节肌肉力量,并且由于其非生理招募机制而表现出快速疲劳。在这里,我们提出了一个闭环控制框架,利用功能性光遗传刺激(FOS)下的生理性肌力调制,在体内实现长时间(大于 60 分钟)的高保真肌肉控制。我们首先揭示了 FOS 的力调制特性,与 FES 相比,FOS 显示了更多的生理招募和明显更高的调制范围(>320%)。其次,我们建立了一个神经肌肉模型,该模型能准确描述光遗传刺激肌肉的高度非线性动力学。第三,在光遗传学模型的基础上,我们展示了对肌肉力量的实时控制,其性能和抗疲劳性均优于 FES。这项工作为抗疲劳神经义肢和具有高保真力调制的光遗传控制生物混合机器人奠定了基础。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

Science Robotics
Mathematics-Control and Optimization
CiteScore
30.60
自引率
2.80%
发文量
83
期刊介绍:
Science Robotics publishes original, peer-reviewed, science- or engineering-based research articles that advance the field of robotics. The journal also features editor-commissioned Reviews. An international team of academic editors holds Science Robotics articles to the same high-quality standard that is the hallmark of the Science family of journals.
Sub-topics include: actuators, advanced materials, artificial Intelligence, autonomous vehicles, bio-inspired design, exoskeletons, fabrication, field robotics, human-robot interaction, humanoids, industrial robotics, kinematics, machine learning, material science, medical technology, motion planning and control, micro- and nano-robotics, multi-robot control, sensors, service robotics, social and ethical issues, soft robotics, and space, planetary and undersea exploration.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


