Leendert-Jan W. Ligtenberg, Nicole C. A. Rabou, Constantinos Goulas, Wytze C. Duinmeijer, Frank R. Halfwerk, Jutta Arens, Roger Lomme, Veronika Magdanz, Anke Klingner, Emily A. M. Klein Rot, Colin H. E. Nijland, Dorothee Wasserberg, H. Remco Liefers, Pascal Jonkheijm, Arturo Susarrey-Arce, Michiel Warlé, Islam S. M. Khalil
{"title":"Ex vivo validation of magnetically actuated intravascular untethered robots in a clinical setting","authors":"Leendert-Jan W. Ligtenberg, Nicole C. A. Rabou, Constantinos Goulas, Wytze C. Duinmeijer, Frank R. Halfwerk, Jutta Arens, Roger Lomme, Veronika Magdanz, Anke Klingner, Emily A. M. Klein Rot, Colin H. E. Nijland, Dorothee Wasserberg, H. Remco Liefers, Pascal Jonkheijm, Arturo Susarrey-Arce, Michiel Warlé, Islam S. M. Khalil","doi":"10.1038/s44172-024-00215-2","DOIUrl":null,"url":null,"abstract":"Intravascular surgical instruments require precise navigation within narrow vessels, necessitating maximum flexibility, minimal diameter, and high degrees of freedom. Existing tools often lack control during insertion due to undesirable bending, limiting vessel accessibility and risking tissue damage. Next-generation instruments aim to develop hemocompatible untethered devices controlled by external magnetic forces. Achieving this goal remains complex due to testing and implementation challenges in clinical environments. Here we assess the operational effectiveness of hemocompatible untethered magnetic robots using an ex vivo porcine aorta model. The results demonstrate a linear decrease in the swimming speed of untethered magnetic robots as arterial blood flow increases, with the capability to navigate against a maximum arterial flow rate of 67 mL/min. The untethered magnetic robots effectively demonstrate locomotion in a difficult-to-access target site, navigating through the abdominal aorta and reaching the distal end of the renal artery. Leendert-Jan W. Ligtenberg and colleagues report an X-ray guided platform for the wireless teleoperation of hemocompatible, untethered magnetic robots. The approach will enable clinicians to reach and treat vascular diseases within the body where alternative tethered flexible surgical instruments offer more limited control.","PeriodicalId":72644,"journal":{"name":"Communications engineering","volume":null,"pages":null},"PeriodicalIF":0.0000,"publicationDate":"2024-05-16","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.nature.com/articles/s44172-024-00215-2.pdf","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Communications engineering","FirstCategoryId":"1085","ListUrlMain":"https://www.nature.com/articles/s44172-024-00215-2","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"","JCRName":"","Score":null,"Total":0}
引用次数: 0
Abstract
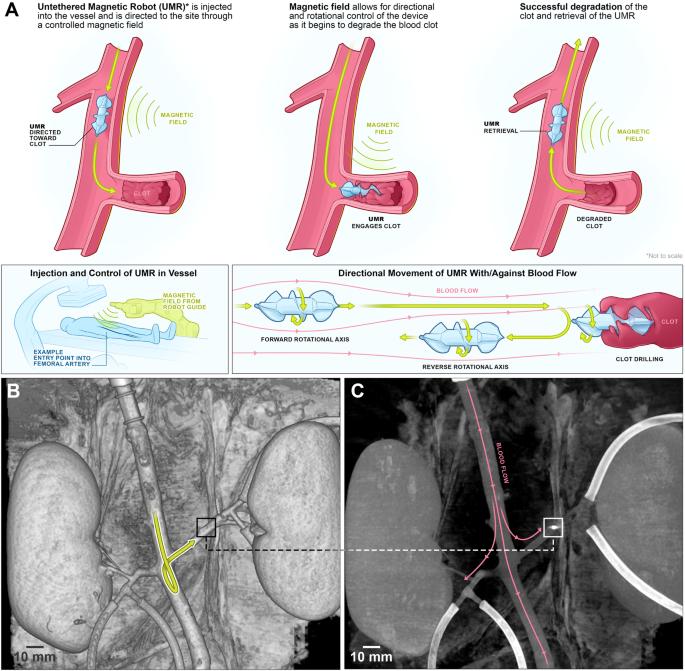
Intravascular surgical instruments require precise navigation within narrow vessels, necessitating maximum flexibility, minimal diameter, and high degrees of freedom. Existing tools often lack control during insertion due to undesirable bending, limiting vessel accessibility and risking tissue damage. Next-generation instruments aim to develop hemocompatible untethered devices controlled by external magnetic forces. Achieving this goal remains complex due to testing and implementation challenges in clinical environments. Here we assess the operational effectiveness of hemocompatible untethered magnetic robots using an ex vivo porcine aorta model. The results demonstrate a linear decrease in the swimming speed of untethered magnetic robots as arterial blood flow increases, with the capability to navigate against a maximum arterial flow rate of 67 mL/min. The untethered magnetic robots effectively demonstrate locomotion in a difficult-to-access target site, navigating through the abdominal aorta and reaching the distal end of the renal artery. Leendert-Jan W. Ligtenberg and colleagues report an X-ray guided platform for the wireless teleoperation of hemocompatible, untethered magnetic robots. The approach will enable clinicians to reach and treat vascular diseases within the body where alternative tethered flexible surgical instruments offer more limited control.
血管内手术器械需要在狭窄的血管内精确导航,因此需要最大的灵活性、最小的直径和高自由度。现有工具在插入过程中往往因弯曲不理想而缺乏控制,从而限制了血管的通达性,并有可能造成组织损伤。下一代器械的目标是开发血液兼容的、由外部磁力控制的无系绳装置。由于临床环境中的测试和实施挑战,实现这一目标仍然很复杂。在这里,我们使用体外猪主动脉模型评估了血液兼容非系留磁性机器人的操作效果。结果表明,随着动脉血流量的增加,非系留磁性机器人的游动速度呈线性下降,能够在最大动脉血流量为 67 毫升/分钟的情况下航行。无系绳磁性机器人有效地展示了在难以进入的目标部位的运动能力,可穿过腹主动脉并到达肾动脉远端。Leendert-Jan W. Ligtenberg 及其同事报告了一个 X 射线引导平台,用于无线远程操作血液兼容的无系磁性机器人。这种方法将使临床医生能够到达并治疗体内的血管疾病,而替代的系绳柔性外科器械提供的控制能力较为有限。

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


