An ultrawide field-of-view pinhole compound eye using hemispherical nanowire array for robot vision
IF 26.1
1区 计算机科学
Q1 ROBOTICS
引用次数: 0
Abstract
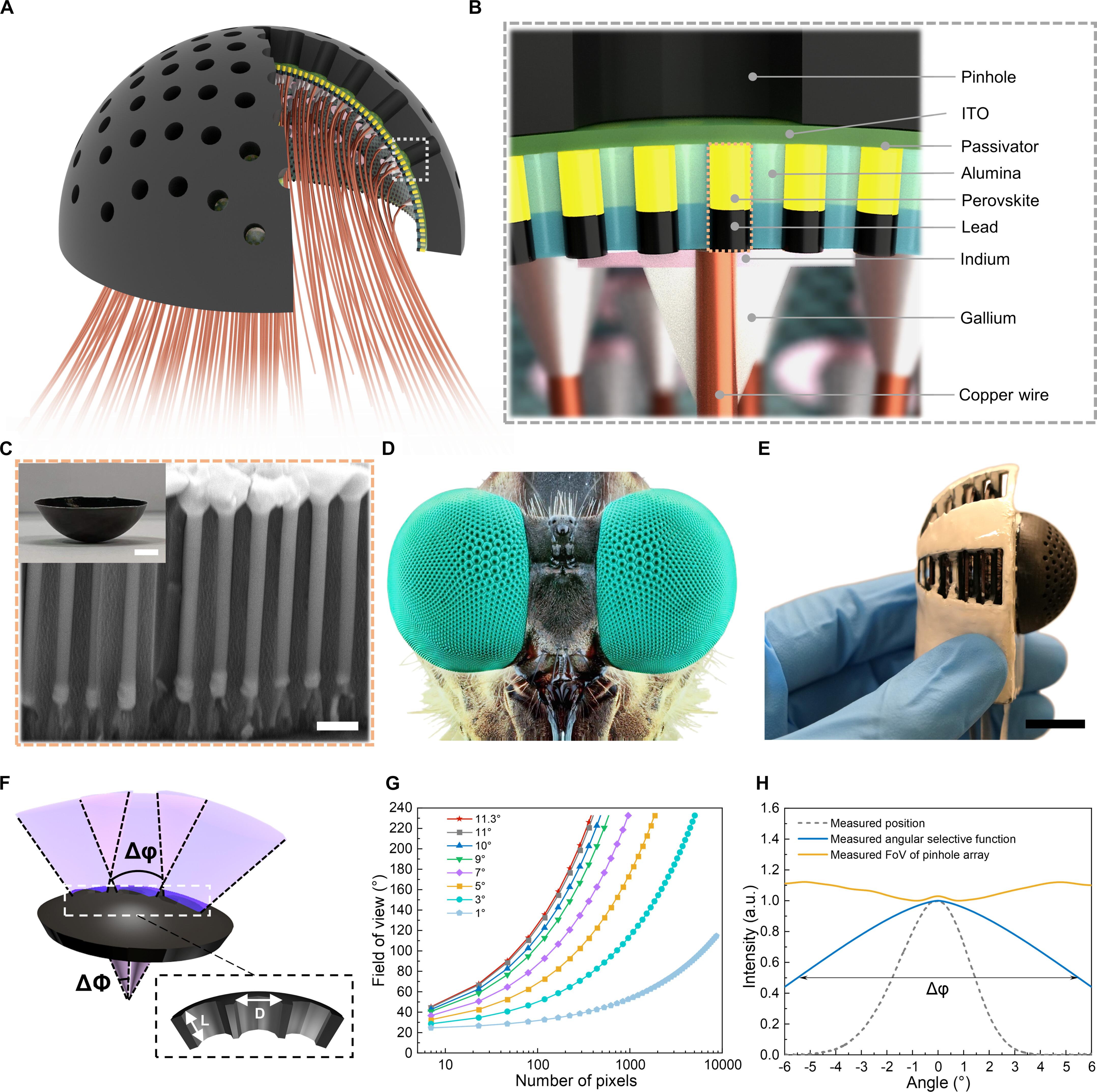
Garnering inspiration from biological compound eyes, artificial vision systems boasting a vivid range of diverse visual functional traits have come to the fore recently. However, most of these artificial systems rely on transformable electronics, which suffer from the complexity and constrained geometry of global deformation, as well as potential mismatches between optical and detector units. Here, we present a unique pinhole compound eye that combines a three-dimensionally printed honeycomb optical structure with a hemispherical, all-solid-state, high-density perovskite nanowire photodetector array. The lens-free pinhole structure can be designed and fabricated with an arbitrary layout to match the underlying image sensor. Optical simulations and imaging results matched well with each other and substantiated the key characteristics and capabilities of our system, which include an ultrawide field of view, accurate target positioning, and motion tracking function. We further demonstrate the potential of our unique compound eye for advanced robotic vision by successfully completing a moving target tracking mission.
使用半球形纳米线阵列的超宽视场针孔复眼,用于机器人视觉。
从生物复眼中汲取灵感,人工视觉系统拥有一系列生动多样的视觉功能特征,近来已崭露头角。然而,这些人工系统大多依赖于可变换电子元件,而电子元件的复杂性和全局变形几何形状的限制,以及光学单元和探测器单元之间潜在的不匹配,都使这些系统受到影响。在这里,我们展示了一种独特的针孔复眼,它将三维打印蜂窝状光学结构与半球形全固态高密度过氧化物纳米线光电探测器阵列结合在一起。无透镜针孔结构可按任意布局设计和制造,以匹配底层图像传感器。光学模拟和成像结果相互吻合,证实了我们系统的关键特性和功能,包括超宽视场、精确目标定位和运动跟踪功能。通过成功完成移动目标跟踪任务,我们进一步证明了我们独特的复眼在先进机器人视觉方面的潜力。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

Science Robotics
Mathematics-Control and Optimization
CiteScore
30.60
自引率
2.80%
发文量
83
期刊介绍:
Science Robotics publishes original, peer-reviewed, science- or engineering-based research articles that advance the field of robotics. The journal also features editor-commissioned Reviews. An international team of academic editors holds Science Robotics articles to the same high-quality standard that is the hallmark of the Science family of journals.
Sub-topics include: actuators, advanced materials, artificial Intelligence, autonomous vehicles, bio-inspired design, exoskeletons, fabrication, field robotics, human-robot interaction, humanoids, industrial robotics, kinematics, machine learning, material science, medical technology, motion planning and control, micro- and nano-robotics, multi-robot control, sensors, service robotics, social and ethical issues, soft robotics, and space, planetary and undersea exploration.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


