{"title":"Elite Dung Beetle Optimization Algorithm for Multi-UAV Cooperative Search in Mountainous Environments","authors":"Xiaoyong Zhang, Wei Yue","doi":"10.1007/s42235-024-00528-0","DOIUrl":null,"url":null,"abstract":"<div><p>This paper aims to address the problem of multi-UAV cooperative search for multiple targets in a mountainous environment, considering the constraints of UAV dynamics and prior environmental information. Firstly, using the target probability distribution map, two strategies of information fusion and information diffusion are employed to solve the problem of environmental information inconsistency caused by different UAVs searching different areas, thereby improving the coordination of UAV groups. Secondly, the task region is decomposed into several high-value sub-regions by using data clustering method. Based on this, a hierarchical search strategy is proposed, which allows precise or rough search in different probability areas by adjusting the altitude of the aircraft, thereby improving the search efficiency. Third, the Elite Dung Beetle Optimization Algorithm (EDBOA) is proposed based on bionics by accurately simulating the social behavior of dung beetles to plan paths that satisfy the UAV dynamics constraints and adapt to the mountainous terrain, where the mountain is considered as an obstacle to be avoided. Finally, the objective function for path optimization is formulated by considering factors such as coverage within the task region, smoothness of the search path, and path length. The effectiveness and superiority of the proposed schemes are verified by the simulation.</p></div>","PeriodicalId":614,"journal":{"name":"Journal of Bionic Engineering","volume":"21 4","pages":"1677 - 1694"},"PeriodicalIF":4.9000,"publicationDate":"2024-05-14","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Bionic Engineering","FirstCategoryId":"94","ListUrlMain":"https://link.springer.com/article/10.1007/s42235-024-00528-0","RegionNum":3,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, MULTIDISCIPLINARY","Score":null,"Total":0}
引用次数: 0
Abstract
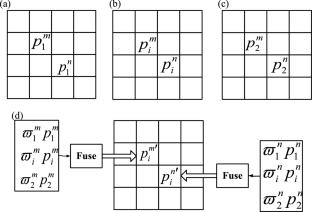
This paper aims to address the problem of multi-UAV cooperative search for multiple targets in a mountainous environment, considering the constraints of UAV dynamics and prior environmental information. Firstly, using the target probability distribution map, two strategies of information fusion and information diffusion are employed to solve the problem of environmental information inconsistency caused by different UAVs searching different areas, thereby improving the coordination of UAV groups. Secondly, the task region is decomposed into several high-value sub-regions by using data clustering method. Based on this, a hierarchical search strategy is proposed, which allows precise or rough search in different probability areas by adjusting the altitude of the aircraft, thereby improving the search efficiency. Third, the Elite Dung Beetle Optimization Algorithm (EDBOA) is proposed based on bionics by accurately simulating the social behavior of dung beetles to plan paths that satisfy the UAV dynamics constraints and adapt to the mountainous terrain, where the mountain is considered as an obstacle to be avoided. Finally, the objective function for path optimization is formulated by considering factors such as coverage within the task region, smoothness of the search path, and path length. The effectiveness and superiority of the proposed schemes are verified by the simulation.
期刊介绍:
The Journal of Bionic Engineering (JBE) is a peer-reviewed journal that publishes original research papers and reviews that apply the knowledge learned from nature and biological systems to solve concrete engineering problems. The topics that JBE covers include but are not limited to:
Mechanisms, kinematical mechanics and control of animal locomotion, development of mobile robots with walking (running and crawling), swimming or flying abilities inspired by animal locomotion.
Structures, morphologies, composition and physical properties of natural and biomaterials; fabrication of new materials mimicking the properties and functions of natural and biomaterials.
Biomedical materials, artificial organs and tissue engineering for medical applications; rehabilitation equipment and devices.
Development of bioinspired computation methods and artificial intelligence for engineering applications.


 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


