{"title":"Improving the stability of a planar tape-spring hyper-redundant manipulator","authors":"Yushu Yu , Hu Liu , Tonghuan Ding , Yi Yang","doi":"10.1016/j.mechatronics.2024.103193","DOIUrl":null,"url":null,"abstract":"<div><p>The planar tape-spring hyper-redundant manipulator presented in this paper is mainly constructed from tape springs, fixed-drive components, and mobile-drive components. It not only has high robustness and excellent transformability, but also high packaging efficiency. However, when the manipulator extends to a long range in motion experiments, some segments of the tape springs buckle. To address this drawback, a kinematic model of the planar tape-spring hyper-redundant manipulator is established, and, a configuration planning method based on a virtual spring model is proposed to solve the inverse kinematics problem. To enhance stability, the column stability is then incorporated into the configuration planning model. This approach relies on only configuration planning to prevent buckling. An alternative approach of adding auxiliary rods into the manipulator is also proposed. With this method, extra intermediate supports have been added to the manipulator. The effective column length of some segments is shortened, which effectively increases the critical buckling load of those segments of the tape spring. Finally, a prototype was subjected to motion and stability experiments to validate the presented approaches and analysis.</p></div>","PeriodicalId":49842,"journal":{"name":"Mechatronics","volume":"101 ","pages":"Article 103193"},"PeriodicalIF":3.1000,"publicationDate":"2024-05-09","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Mechatronics","FirstCategoryId":"94","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0957415824000588","RegionNum":3,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"AUTOMATION & CONTROL SYSTEMS","Score":null,"Total":0}
引用次数: 0
Abstract
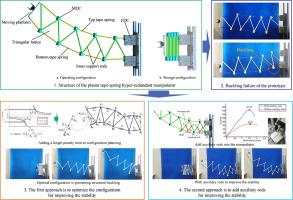
The planar tape-spring hyper-redundant manipulator presented in this paper is mainly constructed from tape springs, fixed-drive components, and mobile-drive components. It not only has high robustness and excellent transformability, but also high packaging efficiency. However, when the manipulator extends to a long range in motion experiments, some segments of the tape springs buckle. To address this drawback, a kinematic model of the planar tape-spring hyper-redundant manipulator is established, and, a configuration planning method based on a virtual spring model is proposed to solve the inverse kinematics problem. To enhance stability, the column stability is then incorporated into the configuration planning model. This approach relies on only configuration planning to prevent buckling. An alternative approach of adding auxiliary rods into the manipulator is also proposed. With this method, extra intermediate supports have been added to the manipulator. The effective column length of some segments is shortened, which effectively increases the critical buckling load of those segments of the tape spring. Finally, a prototype was subjected to motion and stability experiments to validate the presented approaches and analysis.
期刊介绍:
Mechatronics is the synergistic combination of precision mechanical engineering, electronic control and systems thinking in the design of products and manufacturing processes. It relates to the design of systems, devices and products aimed at achieving an optimal balance between basic mechanical structure and its overall control. The purpose of this journal is to provide rapid publication of topical papers featuring practical developments in mechatronics. It will cover a wide range of application areas including consumer product design, instrumentation, manufacturing methods, computer integration and process and device control, and will attract a readership from across the industrial and academic research spectrum. Particular importance will be attached to aspects of innovation in mechatronics design philosophy which illustrate the benefits obtainable by an a priori integration of functionality with embedded microprocessor control. A major item will be the design of machines, devices and systems possessing a degree of computer based intelligence. The journal seeks to publish research progress in this field with an emphasis on the applied rather than the theoretical. It will also serve the dual role of bringing greater recognition to this important area of engineering.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


