{"title":"Model-free control of a magnetically supported plate","authors":"P.M. Scherer , A. Othmane , J. Rudolph","doi":"10.1016/j.conengprac.2024.105950","DOIUrl":null,"url":null,"abstract":"<div><p>Established model-based methods often use a combination of state feedback and observer to control complex systems. They rely on detailed mathematical models that are often hard to derive. Nonetheless, such methods may achieve a high level of accuracy, which justifies the cumbersome modelling. An alternative approach is model-free control, in a form introduced by Fliess and Join, where the system is approximated in a short time interval by a low-order differential equation with unknown parts, a so-called ultra-local model. This control method is a powerful tool, but the parametrisation and the concrete implementation may require time, effort, and experience. The present paper investigates the systematic tuning of a model-free controller for a magnetically supported plate that is modelled as an unstable multiple-input multiple-output system. Furthermore, the incorporation of model information into the model-free controller is investigated. These adaptations ultimately improve results by simplifying parameter tuning and interpretation of estimates. Several experiments are carried out on a test bed to show the capabilities of the proposed algorithms for set point stabilisation and trajectory tracking. The effects of the different parameters in the model-free controllers are addressed, and excellent robustness with respect to actuator faults is demonstrated. Filters for estimating derivatives and unknown quantities are designed using an open-source toolbox.</p></div>","PeriodicalId":50615,"journal":{"name":"Control Engineering Practice","volume":null,"pages":null},"PeriodicalIF":5.4000,"publicationDate":"2024-05-03","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.sciencedirect.com/science/article/pii/S0967066124001102/pdfft?md5=e222eac568b0978f3088844476bab23b&pid=1-s2.0-S0967066124001102-main.pdf","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Control Engineering Practice","FirstCategoryId":"94","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0967066124001102","RegionNum":2,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"AUTOMATION & CONTROL SYSTEMS","Score":null,"Total":0}
引用次数: 0
Abstract
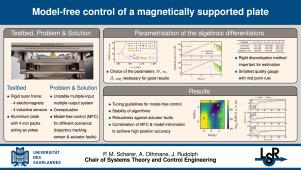
Established model-based methods often use a combination of state feedback and observer to control complex systems. They rely on detailed mathematical models that are often hard to derive. Nonetheless, such methods may achieve a high level of accuracy, which justifies the cumbersome modelling. An alternative approach is model-free control, in a form introduced by Fliess and Join, where the system is approximated in a short time interval by a low-order differential equation with unknown parts, a so-called ultra-local model. This control method is a powerful tool, but the parametrisation and the concrete implementation may require time, effort, and experience. The present paper investigates the systematic tuning of a model-free controller for a magnetically supported plate that is modelled as an unstable multiple-input multiple-output system. Furthermore, the incorporation of model information into the model-free controller is investigated. These adaptations ultimately improve results by simplifying parameter tuning and interpretation of estimates. Several experiments are carried out on a test bed to show the capabilities of the proposed algorithms for set point stabilisation and trajectory tracking. The effects of the different parameters in the model-free controllers are addressed, and excellent robustness with respect to actuator faults is demonstrated. Filters for estimating derivatives and unknown quantities are designed using an open-source toolbox.
期刊介绍:
Control Engineering Practice strives to meet the needs of industrial practitioners and industrially related academics and researchers. It publishes papers which illustrate the direct application of control theory and its supporting tools in all possible areas of automation. As a result, the journal only contains papers which can be considered to have made significant contributions to the application of advanced control techniques. It is normally expected that practical results should be included, but where simulation only studies are available, it is necessary to demonstrate that the simulation model is representative of a genuine application. Strictly theoretical papers will find a more appropriate home in Control Engineering Practice''s sister publication, Automatica. It is also expected that papers are innovative with respect to the state of the art and are sufficiently detailed for a reader to be able to duplicate the main results of the paper (supplementary material, including datasets, tables, code and any relevant interactive material can be made available and downloaded from the website). The benefits of the presented methods must be made very clear and the new techniques must be compared and contrasted with results obtained using existing methods. Moreover, a thorough analysis of failures that may happen in the design process and implementation can also be part of the paper.
The scope of Control Engineering Practice matches the activities of IFAC.
Papers demonstrating the contribution of automation and control in improving the performance, quality, productivity, sustainability, resource and energy efficiency, and the manageability of systems and processes for the benefit of mankind and are relevant to industrial practitioners are most welcome.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


