Samuel D. Schaefer, Jie Xu, Damian Palin, Abir Al-Tabbaa, Fumiya Iida
{"title":"Position-based fluid simulation for robotic injection sealing of pavement cracks","authors":"Samuel D. Schaefer, Jie Xu, Damian Palin, Abir Al-Tabbaa, Fumiya Iida","doi":"10.1002/rob.22339","DOIUrl":null,"url":null,"abstract":"<p>Automated crack sealing could significantly benefit the maintenance of road pavements, but there is difficulty in depositing the correct volume of sealant material into the hidden crack space. A simulated model of the material flow within a crack space would allow the development of a predictive control scheme, such that the repair robot can apply suitable trajectories and operational parameters to accomplish neatly sealed surfaces. For the first time, the position-based fluid (PBF) method, a computationally cheap and fast but approximate model of fluid flows, is studied for its feasibility for sealant flow simulation in the robotic injection crack sealing scenario. A Real-to-Sim experiment is performed, in which a PBF simulation of sealant in a virtual robotic crack sealing environment is mirrored from the physical lab setup. The fluid simulation is tuned to match the real-world dynamics through comparison with 132 simulation runs, varying the artificial viscosity parameters <span></span><math>\n <semantics>\n <mrow>\n \n <mrow>\n <mi>U</mi>\n </mrow>\n </mrow>\n <annotation> <math altimg=\"urn:x-wiley:15564959:media:rob22339:rob22339-math-0001\" wiley:location=\"equation/rob22339-math-0001.png\" xmlns=\"http://www.w3.org/1998/Math/MathML\"><mrow><mrow><mi>U</mi></mrow></mrow></math></annotation>\n </semantics></math> (fluid–fluid viscous interaction) and <span></span><math>\n <semantics>\n <mrow>\n \n <mrow>\n <mi>D</mi>\n </mrow>\n </mrow>\n <annotation> <math altimg=\"urn:x-wiley:15564959:media:rob22339:rob22339-math-0002\" wiley:location=\"equation/rob22339-math-0002.png\" xmlns=\"http://www.w3.org/1998/Math/MathML\"><mrow><mrow><mi>D</mi></mrow></mrow></math></annotation>\n </semantics></math> (fluid–wall viscous interaction). It was found that <span></span><math>\n <semantics>\n <mrow>\n \n <mrow>\n <mi>U</mi>\n </mrow>\n </mrow>\n <annotation> <math altimg=\"urn:x-wiley:15564959:media:rob22339:rob22339-math-0003\" wiley:location=\"equation/rob22339-math-0003.png\" xmlns=\"http://www.w3.org/1998/Math/MathML\"><mrow><mrow><mi>U</mi></mrow></mrow></math></annotation>\n </semantics></math> had a varied three-stage influence on the simulation error while <span></span><math>\n <semantics>\n <mrow>\n \n <mrow>\n <mi>D</mi>\n </mrow>\n </mrow>\n <annotation> <math altimg=\"urn:x-wiley:15564959:media:rob22339:rob22339-math-0004\" wiley:location=\"equation/rob22339-math-0004.png\" xmlns=\"http://www.w3.org/1998/Math/MathML\"><mrow><mrow><mi>D</mi></mrow></mrow></math></annotation>\n </semantics></math>'s negative influence on the simulation error only effectively applied to fluids satisfying <span></span><math>\n <semantics>\n <mrow>\n \n <mrow>\n <mn>1</mn>\n \n <mo><</mo>\n \n <mi>U</mi>\n \n <mo><</mo>\n \n <mn>100</mn>\n </mrow>\n </mrow>\n <annotation> <math altimg=\"urn:x-wiley:15564959:media:rob22339:rob22339-math-0005\" wiley:location=\"equation/rob22339-math-0005.png\" xmlns=\"http://www.w3.org/1998/Math/MathML\"><mrow><mrow><mn>1</mn><mo>\\unicode{x0003C}</mo><mi>U</mi><mo>\\unicode{x0003C}</mo><mn>100</mn></mrow></mrow></math></annotation>\n </semantics></math>. Through comparing the physical and virtual crack sealing results, the simulation was validated with an average fluid level error of 1.26 mm along a 3.1 mm wide, 16 mm deep and 80 mm long artificial crack, which shows the usefulness of the PBF method for robotic injection sealing. The accuracy and computational requirements of the PBF method are also discussed.</p>","PeriodicalId":192,"journal":{"name":"Journal of Field Robotics","volume":"41 5","pages":"1438-1451"},"PeriodicalIF":4.2000,"publicationDate":"2024-04-09","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1002/rob.22339","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Field Robotics","FirstCategoryId":"94","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1002/rob.22339","RegionNum":2,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"ROBOTICS","Score":null,"Total":0}
引用次数: 0
Abstract
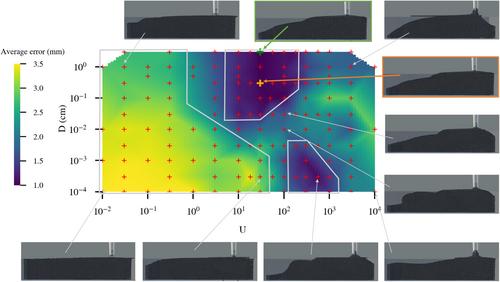
Automated crack sealing could significantly benefit the maintenance of road pavements, but there is difficulty in depositing the correct volume of sealant material into the hidden crack space. A simulated model of the material flow within a crack space would allow the development of a predictive control scheme, such that the repair robot can apply suitable trajectories and operational parameters to accomplish neatly sealed surfaces. For the first time, the position-based fluid (PBF) method, a computationally cheap and fast but approximate model of fluid flows, is studied for its feasibility for sealant flow simulation in the robotic injection crack sealing scenario. A Real-to-Sim experiment is performed, in which a PBF simulation of sealant in a virtual robotic crack sealing environment is mirrored from the physical lab setup. The fluid simulation is tuned to match the real-world dynamics through comparison with 132 simulation runs, varying the artificial viscosity parameters (fluid–fluid viscous interaction) and (fluid–wall viscous interaction). It was found that had a varied three-stage influence on the simulation error while 's negative influence on the simulation error only effectively applied to fluids satisfying . Through comparing the physical and virtual crack sealing results, the simulation was validated with an average fluid level error of 1.26 mm along a 3.1 mm wide, 16 mm deep and 80 mm long artificial crack, which shows the usefulness of the PBF method for robotic injection sealing. The accuracy and computational requirements of the PBF method are also discussed.
期刊介绍:
The Journal of Field Robotics seeks to promote scholarly publications dealing with the fundamentals of robotics in unstructured and dynamic environments.
The Journal focuses on experimental robotics and encourages publication of work that has both theoretical and practical significance.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


