Marco Andrés Luna, Martin Molina, Rodrigo Da-Silva-Gomez, Javier Melero-Deza, Pedro Arias-Perez, Pascual Campoy
{"title":"A multi-UAV system for coverage path planning applications with in-flight re-planning capabilities","authors":"Marco Andrés Luna, Martin Molina, Rodrigo Da-Silva-Gomez, Javier Melero-Deza, Pedro Arias-Perez, Pascual Campoy","doi":"10.1002/rob.22342","DOIUrl":null,"url":null,"abstract":"<p>This paper presents the development and implementation of a multiple unmanned aerial vehicle system focused on coverage path planning on multiple separated areas capable of re-planning the collective mission in case of unexpected events. For this purpose, we present a distributed-centralized architecture that uses heuristic and computationally efficient methods to perform the planning/re-planning and decision-making tasks during the control of the mission execution. We performed a computational evaluation of the algorithms, comparing them with other proposals, together with experiments in simulated and real flights. The results show that the system can distribute tasks equitably among the aircraft in an efficient way, even in the middle of the flight, when facing unexpected events; and show a higher computational efficiency when compared to multiple proposals in the state of the art.</p>","PeriodicalId":192,"journal":{"name":"Journal of Field Robotics","volume":"41 5","pages":"1480-1497"},"PeriodicalIF":4.2000,"publicationDate":"2024-04-11","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1002/rob.22342","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Field Robotics","FirstCategoryId":"94","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1002/rob.22342","RegionNum":2,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"ROBOTICS","Score":null,"Total":0}
引用次数: 0
Abstract
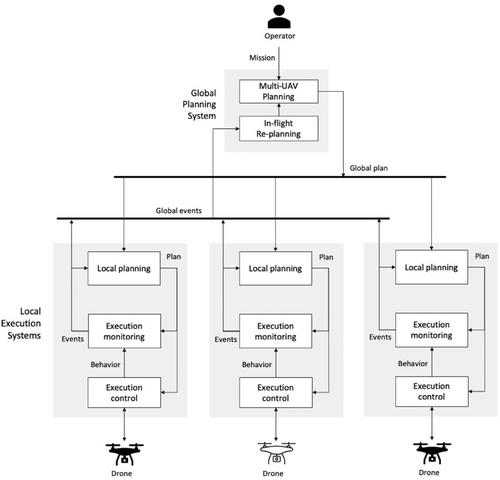
This paper presents the development and implementation of a multiple unmanned aerial vehicle system focused on coverage path planning on multiple separated areas capable of re-planning the collective mission in case of unexpected events. For this purpose, we present a distributed-centralized architecture that uses heuristic and computationally efficient methods to perform the planning/re-planning and decision-making tasks during the control of the mission execution. We performed a computational evaluation of the algorithms, comparing them with other proposals, together with experiments in simulated and real flights. The results show that the system can distribute tasks equitably among the aircraft in an efficient way, even in the middle of the flight, when facing unexpected events; and show a higher computational efficiency when compared to multiple proposals in the state of the art.
期刊介绍:
The Journal of Field Robotics seeks to promote scholarly publications dealing with the fundamentals of robotics in unstructured and dynamic environments.
The Journal focuses on experimental robotics and encourages publication of work that has both theoretical and practical significance.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


