Ebbe Poulsen , Søren Rysgaard , Karina Hansen , Nanna B. Karlsson
{"title":"Uncrewed aerial vehicle with onboard winch system for rapid, cost-effective, and safe oceanographic profiling in hazardous and inaccessible areas","authors":"Ebbe Poulsen , Søren Rysgaard , Karina Hansen , Nanna B. Karlsson","doi":"10.1016/j.ohx.2024.e00518","DOIUrl":null,"url":null,"abstract":"<div><p>Interactions between coastal waters and marine-terminating glaciers in the Polar Regions play a significant role in global sea level rise fueled by a rapidly warming Arctic.</p><p>The risk of glacier calving, and the abundance of ice, can make it impossible for surface vessels to access the waters near glacier termini. Alternative methods using manned aircraft are expensive. As a result, oceanographic measurements are limited near glacier termini.</p><p>We present an uncrewed aerial vehicle (UAV) with an on-board winch system that allows oceanographic profiling in remote, hazardous areas using a commercial conductivity, temperature, and depth (CTD) sensor payload. The UAV is optimized for easy handling and deployment and is capable of high-speed and efficient cruise flight. An autopilot system provides pilot assistance and autonomous flight capabilities. The total weight of the UAV including payload is 6.5 kg with an endurance of 24 min.</p><p>Testing of the system was conducted in South Greenland during winter conditions in March 2023 with successful profiles collected near a glacier terminus (<5 m) and in small openings in ice mélange (2.2 m). The system proved capable, reliable, and efficient. Further development of the system will allow other sensors for an even more flexible measurement suite.</p></div>","PeriodicalId":37503,"journal":{"name":"HardwareX","volume":"18 ","pages":"Article e00518"},"PeriodicalIF":2.0000,"publicationDate":"2024-03-16","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.sciencedirect.com/science/article/pii/S2468067224000129/pdfft?md5=f79c6c56364e0e5e37e0769ee07a7a61&pid=1-s2.0-S2468067224000129-main.pdf","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"HardwareX","FirstCategoryId":"1085","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S2468067224000129","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"ENGINEERING, ELECTRICAL & ELECTRONIC","Score":null,"Total":0}
引用次数: 0
Abstract
Interactions between coastal waters and marine-terminating glaciers in the Polar Regions play a significant role in global sea level rise fueled by a rapidly warming Arctic.
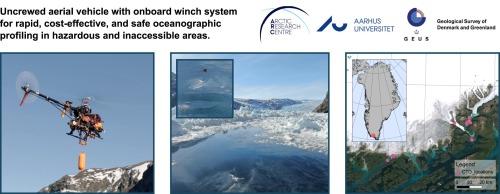
The risk of glacier calving, and the abundance of ice, can make it impossible for surface vessels to access the waters near glacier termini. Alternative methods using manned aircraft are expensive. As a result, oceanographic measurements are limited near glacier termini.
We present an uncrewed aerial vehicle (UAV) with an on-board winch system that allows oceanographic profiling in remote, hazardous areas using a commercial conductivity, temperature, and depth (CTD) sensor payload. The UAV is optimized for easy handling and deployment and is capable of high-speed and efficient cruise flight. An autopilot system provides pilot assistance and autonomous flight capabilities. The total weight of the UAV including payload is 6.5 kg with an endurance of 24 min.
Testing of the system was conducted in South Greenland during winter conditions in March 2023 with successful profiles collected near a glacier terminus (<5 m) and in small openings in ice mélange (2.2 m). The system proved capable, reliable, and efficient. Further development of the system will allow other sensors for an even more flexible measurement suite.
HardwareXEngineering-Industrial and Manufacturing Engineering
CiteScore
4.10
自引率
18.20%
发文量
124
审稿时长
24 weeks
期刊介绍:
HardwareX is an open access journal established to promote free and open source designing, building and customizing of scientific infrastructure (hardware). HardwareX aims to recognize researchers for the time and effort in developing scientific infrastructure while providing end-users with sufficient information to replicate and validate the advances presented. HardwareX is open to input from all scientific, technological and medical disciplines. Scientific infrastructure will be interpreted in the broadest sense. Including hardware modifications to existing infrastructure, sensors and tools that perform measurements and other functions outside of the traditional lab setting (such as wearables, air/water quality sensors, and low cost alternatives to existing tools), and the creation of wholly new tools for either standard or novel laboratory tasks. Authors are encouraged to submit hardware developments that address all aspects of science, not only the final measurement, for example, enhancements in sample preparation and handling, user safety, and quality control. The use of distributed digital manufacturing strategies (e.g. 3-D printing) is encouraged. All designs must be submitted under an open hardware license.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


