{"title":"Cubic marine robotics","authors":"Jing Zhou, Sideng Hu, Tiefeng Li, Xiangning He","doi":"10.1038/s44287-024-00030-z","DOIUrl":null,"url":null,"abstract":"Modular robotics offers design flexibility that could enable the scale-up of robotic systems for marine applications. We have developed simple repeating cubic modular components that can be assembled and reconfigured to create different types of underwater robots for marine applications, enabling them to navigate and perform tasks underwater with ease and efficiency.","PeriodicalId":501701,"journal":{"name":"Nature Reviews Electrical Engineering","volume":"1 3","pages":"143-144"},"PeriodicalIF":0.0000,"publicationDate":"2024-02-28","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Nature Reviews Electrical Engineering","FirstCategoryId":"1085","ListUrlMain":"https://www.nature.com/articles/s44287-024-00030-z","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"","JCRName":"","Score":null,"Total":0}
引用次数: 0
Abstract
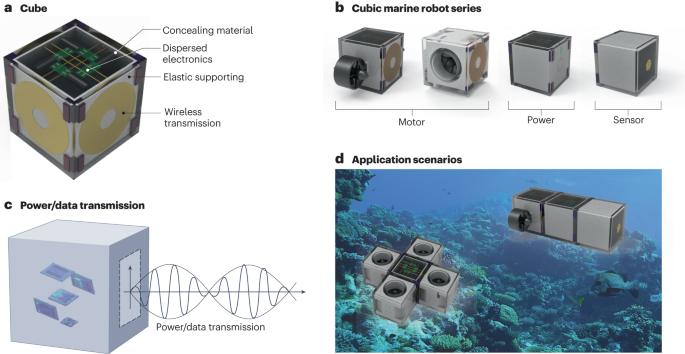
Modular robotics offers design flexibility that could enable the scale-up of robotic systems for marine applications. We have developed simple repeating cubic modular components that can be assembled and reconfigured to create different types of underwater robots for marine applications, enabling them to navigate and perform tasks underwater with ease and efficiency.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


