iCub3 avatar system: Enabling remote fully immersive embodiment of humanoid robots
IF 26.1
1区 计算机科学
Q1 ROBOTICS
引用次数: 0
Abstract
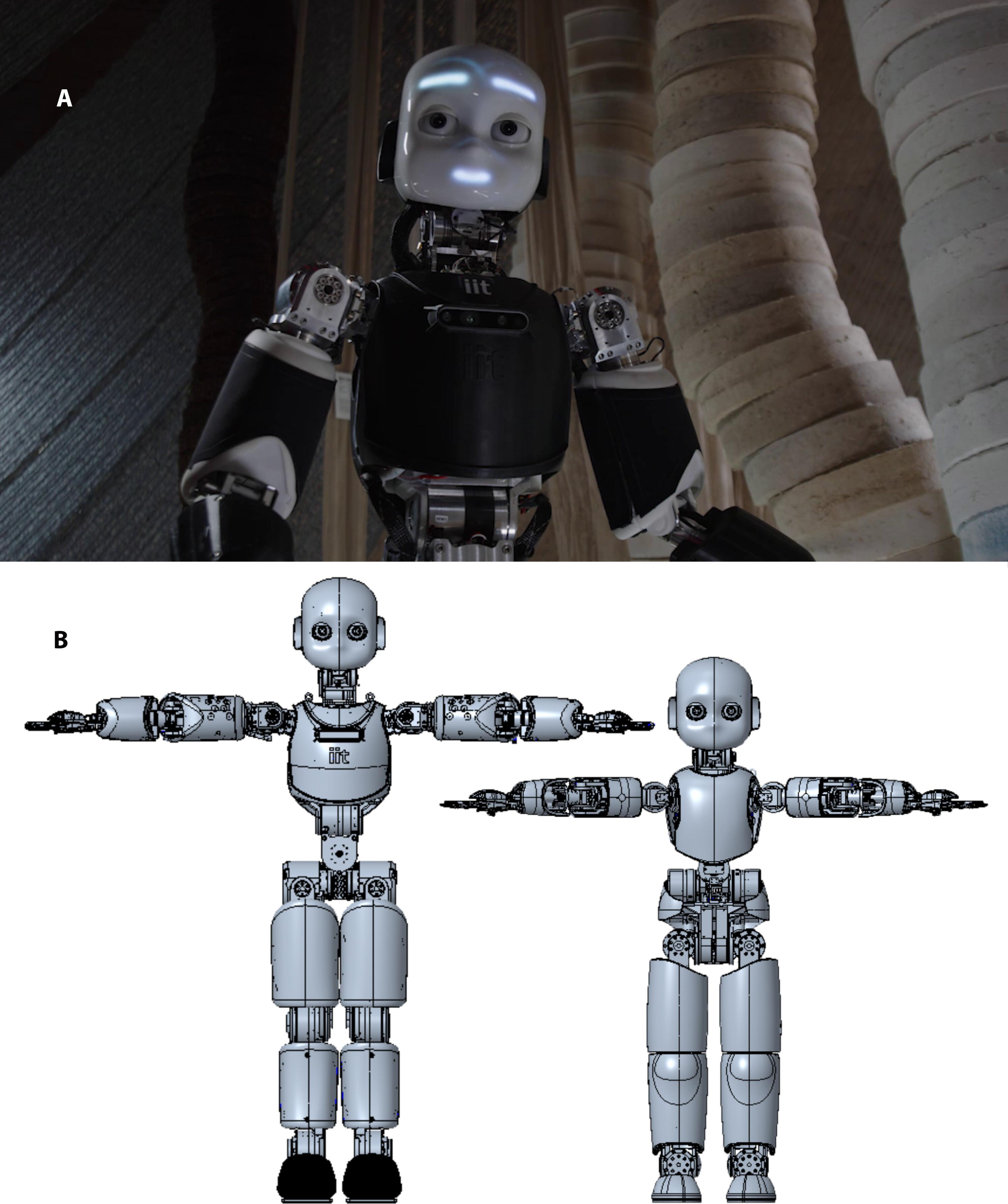
We present an avatar system designed to facilitate the embodiment of humanoid robots by human operators, validated through iCub3, a humanoid developed at the Istituto Italiano di Tecnologia. More precisely, the paper makes two contributions: First, we present the humanoid iCub3 as a robotic avatar that integrates the latest significant improvements after about 15 years of development of the iCub series. Second, we present a versatile avatar system enabling humans to embody humanoid robots encompassing aspects such as locomotion, manipulation, voice, and facial expressions with comprehensive sensory feedback including visual, auditory, haptic, weight, and touch modalities. We validated the system by implementing several avatar architecture instances, each tailored to specific requirements. First, we evaluated the optimized architecture for verbal, nonverbal, and physical interactions with a remote recipient. This testing involved the operator in Genoa and the avatar in the Biennale di Venezia, Venice—about 290 kilometers away—thus allowing the operator to visit the Italian art exhibition remotely. Second, we evaluated the optimized architecture for recipient physical collaboration and public engagement on stage, live, at the We Make Future show, a prominent world digital innovation festival. In this instance, the operator was situated in Genoa while the avatar operated in Rimini—about 300 kilometers away—interacting with a recipient who entrusted the avatar with a payload to carry on stage before an audience of approximately 2000 spectators. Third, we present the architecture implemented by the iCub Team for the All Nippon Airways (ANA) Avatar XPrize competition.
iCub3 化身系统:实现仿人机器人的远程全沉浸式化身。
我们介绍了一个化身系统,该系统旨在促进人类操作员对仿人机器人的体现,并通过意大利技术研究所开发的仿人机器人 iCub3 进行了验证。更确切地说,本文有两个贡献:首先,我们将仿人机器人 iCub3 介绍为机器人化身,它集成了 iCub 系列机器人 15 年发展后的最新重大改进。其次,我们提出了一个多功能化身系统,使人类能够化身为仿人机器人,包括运动、操纵、语音和面部表情等方面,并提供全面的感官反馈,包括视觉、听觉、触觉、重量和触摸模式。我们通过实施多个化身架构实例验证了该系统,每个实例都是根据特定要求量身定制的。首先,我们评估了与远程接收者进行语言、非语言和物理交互的优化架构。测试中,操作员在热那亚,而虚拟化身在威尼斯的威尼斯双年展(距离威尼斯约 290 公里),因此操作员可以远程参观意大利艺术展。其次,我们在世界著名的数字创新节 "我们创造未来"(We Make Future)展会上,现场评估了针对接收者实体协作和公众参与的优化架构。在这种情况下,操作员位于热那亚,而化身则在里米尼--大约 300 公里之外--与接受者互动,接受者委托化身携带有效载荷在舞台上面对大约 2000 名观众。第三,我们介绍了 iCub 团队为全日空(ANA)阿凡达 XPrize 竞赛实施的架构。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

Science Robotics
Mathematics-Control and Optimization
CiteScore
30.60
自引率
2.80%
发文量
83
期刊介绍:
Science Robotics publishes original, peer-reviewed, science- or engineering-based research articles that advance the field of robotics. The journal also features editor-commissioned Reviews. An international team of academic editors holds Science Robotics articles to the same high-quality standard that is the hallmark of the Science family of journals.
Sub-topics include: actuators, advanced materials, artificial Intelligence, autonomous vehicles, bio-inspired design, exoskeletons, fabrication, field robotics, human-robot interaction, humanoids, industrial robotics, kinematics, machine learning, material science, medical technology, motion planning and control, micro- and nano-robotics, multi-robot control, sensors, service robotics, social and ethical issues, soft robotics, and space, planetary and undersea exploration.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


