Chunpeng Wang, Rui Luo, John Peter Whitney, Taskin Padir
{"title":"Practical Approaches Towards Transparent and Stable Bilateral Teleoperation Under Time-Varying Network Delay","authors":"Chunpeng Wang, Rui Luo, John Peter Whitney, Taskin Padir","doi":"10.1007/s12369-023-01092-z","DOIUrl":null,"url":null,"abstract":"<p>In real-life teleoperation scenarios, the presence of time-varying network delays, particularly in wireless networks, poses significant challenges in maintaining stability in a bilateral teleoperation system. Various approaches have been proposed in the past to address stability concerns; however, these often come at the expense of system transparency. Nevertheless, increasing transparency is crucial in a teleoperation system to enable precise and safe operations, as well as to provide real-time decision-making capabilities for the operator. This paper presents our comprehensive approaches to maximize teleoperation transparency by minimizing system impedance, enhance the wave variable method to handle time-varying network delays, and alleviate non-smooth effects caused by network jitters in bilateral teleoperation. The proposed methodologies take into account the real-world challenges and considerations to ensure the practical applicability and effectiveness of the teleoperation system. Throughout these implementations, passivity analysis is employed to ensure system stability, guaranteeing a reliable and safe teleoperation experience. The proposed approaches were successfully validated in Team Northeastern’s Avatar telepresence system, which achieved the 3rd place in ANA Avatar XPRIZE challenge.\n</p>","PeriodicalId":14361,"journal":{"name":"International Journal of Social Robotics","volume":"2 1","pages":""},"PeriodicalIF":3.8000,"publicationDate":"2024-01-22","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Journal of Social Robotics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.1007/s12369-023-01092-z","RegionNum":2,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"ROBOTICS","Score":null,"Total":0}
引用次数: 0
Abstract
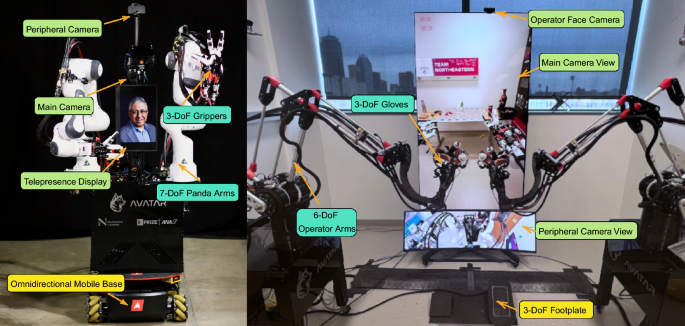
In real-life teleoperation scenarios, the presence of time-varying network delays, particularly in wireless networks, poses significant challenges in maintaining stability in a bilateral teleoperation system. Various approaches have been proposed in the past to address stability concerns; however, these often come at the expense of system transparency. Nevertheless, increasing transparency is crucial in a teleoperation system to enable precise and safe operations, as well as to provide real-time decision-making capabilities for the operator. This paper presents our comprehensive approaches to maximize teleoperation transparency by minimizing system impedance, enhance the wave variable method to handle time-varying network delays, and alleviate non-smooth effects caused by network jitters in bilateral teleoperation. The proposed methodologies take into account the real-world challenges and considerations to ensure the practical applicability and effectiveness of the teleoperation system. Throughout these implementations, passivity analysis is employed to ensure system stability, guaranteeing a reliable and safe teleoperation experience. The proposed approaches were successfully validated in Team Northeastern’s Avatar telepresence system, which achieved the 3rd place in ANA Avatar XPRIZE challenge.
在现实生活中的远程操作场景中,时变网络延迟的存在,尤其是在无线网络中,对保持双边远程操作系统的稳定性构成了巨大挑战。过去曾提出过多种方法来解决稳定性问题,但这些方法往往以牺牲系统透明度为代价。然而,提高透明度对于远程操纵系统来说至关重要,不仅能实现精确安全的操作,还能为操作员提供实时决策能力。本文介绍了我们的综合方法,通过最小化系统阻抗来最大限度地提高遥操作透明度,增强波形变量法以处理时变网络延迟,以及减轻双边遥操作中网络抖动引起的非平稳效应。所提出的方法考虑到了现实世界中的挑战和因素,以确保远程操纵系统的实用性和有效性。在整个实施过程中,采用了被动性分析来确保系统的稳定性,从而保证可靠和安全的远程操作体验。东北大学团队的阿凡达远程呈现系统成功地验证了所提出的方法,该系统在 ANA 阿凡达 XPRIZE 挑战赛中获得了第三名。
期刊介绍:
Social Robotics is the study of robots that are able to interact and communicate among themselves, with humans, and with the environment, within the social and cultural structure attached to its role. The journal covers a broad spectrum of topics related to the latest technologies, new research results and developments in the area of social robotics on all levels, from developments in core enabling technologies to system integration, aesthetic design, applications and social implications. It provides a platform for like-minded researchers to present their findings and latest developments in social robotics, covering relevant advances in engineering, computing, arts and social sciences.
The journal publishes original, peer reviewed articles and contributions on innovative ideas and concepts, new discoveries and improvements, as well as novel applications, by leading researchers and developers regarding the latest fundamental advances in the core technologies that form the backbone of social robotics, distinguished developmental projects in the area, as well as seminal works in aesthetic design, ethics and philosophy, studies on social impact and influence, pertaining to social robotics.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


