SGPLane: Efficient lane detection via sampled grid points for autonomous driving
IF 6.3
3区 综合性期刊
Q1 Multidisciplinary
引用次数: 0
Abstract
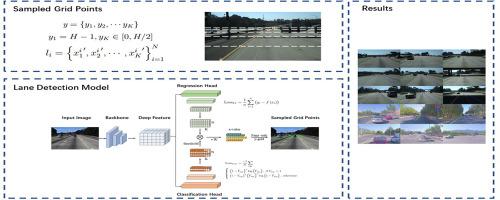
Lane detection is one of the critical tasks for autonomous driving. Earlier works revolved around semantic segmentation and object detection with a special program for lanes. However, most methods still suffer from unstable post-processing algorithms which leads to a gap between camera input and downstream applications. In this paper, we propose a novel detection presentation form for lanes and design a simple network without any complicated post-process. Specifically, we use sampled gird points to express lane lines and construct a network for the special lane format, which is called SGPLane. Therefore, the network learns a regression branch and a confidence branch to realize end-to-end lane detection by setting the threshold confidence value. Our model is validated on the typical dataset and real-world driving scenes. Experiments on lane detection benchmarks show that our method outperforms previous methods with accuracy score of 96.84 on Tusimple dataset with high FPS and 76.85 on our real-world dataset.
SGPLane:通过采样网格点为自动驾驶提供高效车道检测
车道检测是自动驾驶的关键任务之一。早期的工作围绕语义分割和目标检测与一个特殊的程序车道。然而,大多数方法仍然存在后处理算法不稳定的问题,导致相机输入和下游应用之间存在差距。在本文中,我们提出了一种新的车道检测表示形式,并设计了一个简单的网络,没有任何复杂的后处理。具体来说,我们使用采样网格点来表示车道线,并构建了一个特殊车道格式的网络,称为SGPLane。因此,网络学习一个回归分支和一个置信分支,通过设置阈值置信值来实现端到端的车道检测。我们的模型在典型数据集和真实驾驶场景上进行了验证。车道检测基准实验表明,该方法在高FPS的Tusimple数据集上的准确率为96.84%,在真实数据集上的准确率为76.85%,优于以往的方法。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

Fundamental Research
Multidisciplinary-Multidisciplinary
CiteScore
4.00
自引率
1.60%
发文量
294
审稿时长
79 days
期刊介绍:
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


