A soft magnetoelectric finger for robots’ multidirectional tactile perception in non-visual recognition environments
IF 12.3
1区 材料科学
Q1 ENGINEERING, ELECTRICAL & ELECTRONIC
引用次数: 0
Abstract
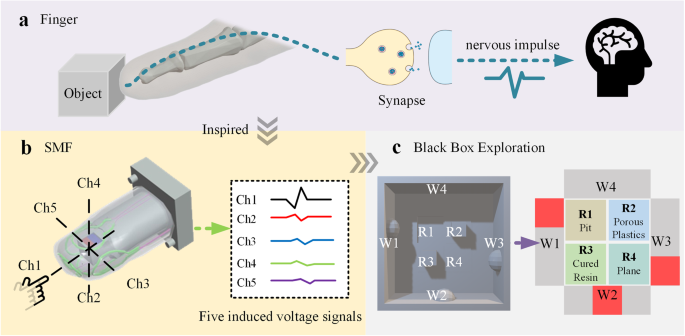
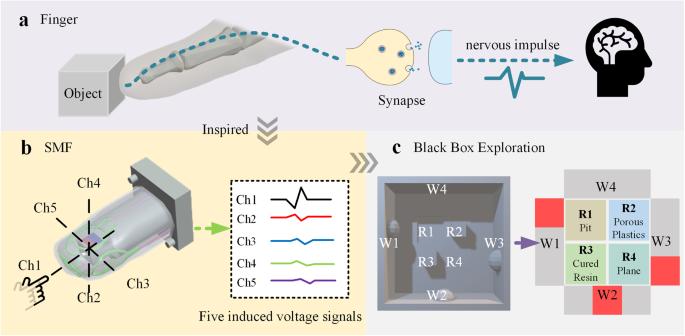
Robotic fingers with multidirectional tactile perception are of great importance for the robotic exploration of complex unknown space, especially in environments in which visualization is not possible. Unfortunately, most existing tactile sensors for robotic fingers cannot detect multidirectional forces, which greatly limits their potential for further development in navigating complex environments. Here, we demonstrate a soft magnetoelectric finger (SMF) that can achieve self-generated-signal and multidirectional tactile sensing. The SMF is composed of two parts: a ‘finger’ covered with a skin-like flexible sheath containing five liquid metal (LM) coils and a ‘phalangeal bone’ containing a magnet. Due to the changes in magnetic flux through the LM coils caused by external forces, diverse induced voltages are generated and collected in real-time, which can be explained by Maxwell’s numerical simulation. By the analysis of the signals generated by the five LM coils, the SMF can detect forces in varied directions and distinguish 6 different common objects with varied Young’s moduli with an accuracy of 97.46%. These capabilities make the SMF suitable for complex unknown space exploration tasks, as proved by the black box exploration. The SMF can enable the development of self-generated-signal and multidirectional tactile perception for future robots.
用于机器人在非视觉识别环境中进行多向触觉感知的软磁电手指
具有多向触觉感知能力的机器人手指对于机器人探索复杂的未知空间具有重要意义,尤其是在无法实现可视化的环境中。遗憾的是,大多数现有的机器人手指触觉传感器无法检测多向力,这极大地限制了它们在复杂环境导航方面的进一步发展潜力。在这里,我们展示了一种软磁电手指(SMF),它可以实现自发信号和多向触觉传感。软磁电手指由两部分组成:一个 "手指",外面包有类似皮肤的柔性鞘,内含五个液态金属(LM)线圈;一个 "趾骨",内含一块磁铁。由于外力导致通过 LM 线圈的磁通量发生变化,因此会产生并实时收集各种感应电压,这可以用麦克斯韦数值模拟来解释。通过分析五个 LM 线圈产生的信号,SMF 可以检测到不同方向的力,并以 97.46% 的准确率区分出 6 种不同杨氏模量的常见物体。这些功能使 SMF 适用于复杂的未知空间探索任务,黑盒探索证明了这一点。SMF可以为未来机器人开发自发信号和多方向触觉感知技术。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

npj Flexible Electronics
Multiple-
CiteScore
17.10
自引率
4.80%
发文量
91
审稿时长
6 weeks
期刊介绍:
npj Flexible Electronics is an online-only and open access journal, which publishes high-quality papers related to flexible electronic systems, including plastic electronics and emerging materials, new device design and fabrication technologies, and applications.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


