{"title":"3D-printed composites with a programmable response to tension and torsion: A design guide","authors":"Rita Levit, Noy Cohen","doi":"10.1016/j.mechrescom.2023.104232","DOIUrl":null,"url":null,"abstract":"<div><p>3D-printed composite structures employed in applications such as soft robotics, actuators, and artificial muscles typically experience different loading and deformation modes<span> throughout their life cycle. Tailoring the mechanical properties and responses to those modes in an independent manner can significantly enhance performance. In this work, we propose a helical fiber embedded cylindrical matrix as a platform to independently tune the behavior under two loading modes — uniaxial extension without twist and torsion at a constant length. Using finite elements (FE), we study the influence of the helical geometry, the volume fraction, and the moduli of the matrix and the fiber on the stiffness and the constitutive behavior. Our findings reveal that the responses to tension and torsion can be programmed by an appropriate choice of geometrical and material parameters. For example, we show that one can achieve composites with the same stiffness and behavior under uniaxial extension but a wide range of responses to torsion. As a design guide, the wide range of properties and potential strengths that can be obtained in these composites are mapped. To demonstrate the validity of this design, composites embedded with a helical fiber were 3D-printed and tested under tension and torsion. The experimentally observed trends agree with the FE simulations. The design and the insights from this work can be used to enhance and optimize the performance of structures in various applications. For example, this composite design can be used in lattice structures to tune the local response.</span></p></div>","PeriodicalId":49846,"journal":{"name":"Mechanics Research Communications","volume":"135 ","pages":"Article 104232"},"PeriodicalIF":1.9000,"publicationDate":"2023-12-13","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Mechanics Research Communications","FirstCategoryId":"5","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S009364132300191X","RegionNum":4,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"MECHANICS","Score":null,"Total":0}
引用次数: 0
Abstract
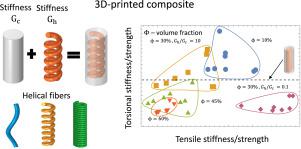
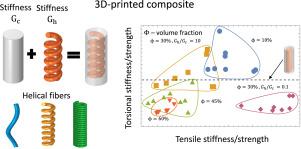
3D-printed composite structures employed in applications such as soft robotics, actuators, and artificial muscles typically experience different loading and deformation modes throughout their life cycle. Tailoring the mechanical properties and responses to those modes in an independent manner can significantly enhance performance. In this work, we propose a helical fiber embedded cylindrical matrix as a platform to independently tune the behavior under two loading modes — uniaxial extension without twist and torsion at a constant length. Using finite elements (FE), we study the influence of the helical geometry, the volume fraction, and the moduli of the matrix and the fiber on the stiffness and the constitutive behavior. Our findings reveal that the responses to tension and torsion can be programmed by an appropriate choice of geometrical and material parameters. For example, we show that one can achieve composites with the same stiffness and behavior under uniaxial extension but a wide range of responses to torsion. As a design guide, the wide range of properties and potential strengths that can be obtained in these composites are mapped. To demonstrate the validity of this design, composites embedded with a helical fiber were 3D-printed and tested under tension and torsion. The experimentally observed trends agree with the FE simulations. The design and the insights from this work can be used to enhance and optimize the performance of structures in various applications. For example, this composite design can be used in lattice structures to tune the local response.
期刊介绍:
Mechanics Research Communications publishes, as rapidly as possible, peer-reviewed manuscripts of high standards but restricted length. It aims to provide:
• a fast means of communication
• an exchange of ideas among workers in mechanics
• an effective method of bringing new results quickly to the public
• an informal vehicle for the discussion
• of ideas that may still be in the formative stages
The field of Mechanics will be understood to encompass the behavior of continua, fluids, solids, particles and their mixtures. Submissions must contain a strong, novel contribution to the field of mechanics, and ideally should be focused on current issues in the field involving theoretical, experimental and/or applied research, preferably within the broad expertise encompassed by the Board of Associate Editors. Deviations from these areas should be discussed in advance with the Editor-in-Chief.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


