Huaizhi Zong, Junhui Zhang, Lei Jiang, Kun Zhang, Jun Shen, Zhenyu Lu, Ke Wang, Yanli Wang, Bing Xu
{"title":"Bionic lightweight design of limb leg units for hydraulic quadruped robots by additive manufacturing and topology optimization","authors":"Huaizhi Zong, Junhui Zhang, Lei Jiang, Kun Zhang, Jun Shen, Zhenyu Lu, Ke Wang, Yanli Wang, Bing Xu","doi":"10.1007/s42242-023-00256-0","DOIUrl":null,"url":null,"abstract":"<p>Galloping cheetahs, climbing mountain goats, and load hauling horses all show desirable locomotion capability, which motivates the development of quadruped robots. Among various quadruped robots, hydraulically driven quadruped robots show great potential in unstructured environments due to their discrete landing positions and large payloads. As the most critical movement unit of a quadruped robot, the limb leg unit (LLU) directly affects movement speed and reliability, and requires a compact and lightweight design. Inspired by the dexterous skeleton–muscle systems of cheetahs and humans, this paper proposes a highly integrated bionic actuator system for a better dynamic performance of an LLU. We propose that a cylinder barrel with multiple element interfaces and internal smooth channels is realized using metal additive manufacturing, and hybrid lattice structures are introduced into the lightweight design of the piston rod. In addition, additive manufacturing and topology optimization are incorporated to reduce the redundant material of the structural parts of the LLU. The mechanical properties of the actuator system are verified by numerical simulation and experiments, and the power density of the actuators is far greater than that of cheetah muscle. The mass of the optimized LLU is reduced by 24.5%, and the optimized LLU shows better response time performance when given a step signal, and presents a good trajectory tracking ability with the increase in motion frequency.</p><h3 data-test=\"abstract-sub-heading\">Graphic abstract</h3>","PeriodicalId":48627,"journal":{"name":"Bio-Design and Manufacturing","volume":"19 1","pages":""},"PeriodicalIF":7.6000,"publicationDate":"2023-12-09","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"1","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Bio-Design and Manufacturing","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.1007/s42242-023-00256-0","RegionNum":1,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, BIOMEDICAL","Score":null,"Total":0}
引用次数: 1
Abstract
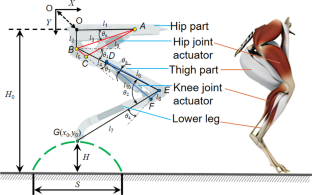
Galloping cheetahs, climbing mountain goats, and load hauling horses all show desirable locomotion capability, which motivates the development of quadruped robots. Among various quadruped robots, hydraulically driven quadruped robots show great potential in unstructured environments due to their discrete landing positions and large payloads. As the most critical movement unit of a quadruped robot, the limb leg unit (LLU) directly affects movement speed and reliability, and requires a compact and lightweight design. Inspired by the dexterous skeleton–muscle systems of cheetahs and humans, this paper proposes a highly integrated bionic actuator system for a better dynamic performance of an LLU. We propose that a cylinder barrel with multiple element interfaces and internal smooth channels is realized using metal additive manufacturing, and hybrid lattice structures are introduced into the lightweight design of the piston rod. In addition, additive manufacturing and topology optimization are incorporated to reduce the redundant material of the structural parts of the LLU. The mechanical properties of the actuator system are verified by numerical simulation and experiments, and the power density of the actuators is far greater than that of cheetah muscle. The mass of the optimized LLU is reduced by 24.5%, and the optimized LLU shows better response time performance when given a step signal, and presents a good trajectory tracking ability with the increase in motion frequency.
期刊介绍:
Bio-Design and Manufacturing reports new research, new technology and new applications in the field of biomanufacturing, especially 3D bioprinting. Topics of Bio-Design and Manufacturing cover tissue engineering, regenerative medicine, mechanical devices from the perspectives of materials, biology, medicine and mechanical engineering, with a focus on manufacturing science and technology to fulfil the requirement of bio-design.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


