Raúl Gismeros Moreno, Filipe Marques, Eduardo Corral Abad, Jesús Meneses Alonso, Paulo Flores, Cristina Castejon
{"title":"Enhanced modelling of planar radial-loaded deep groove ball bearings with smooth-contact formulation","authors":"Raúl Gismeros Moreno, Filipe Marques, Eduardo Corral Abad, Jesús Meneses Alonso, Paulo Flores, Cristina Castejon","doi":"10.1007/s11044-023-09952-2","DOIUrl":null,"url":null,"abstract":"<p>Bearings are mechanical components designed to restrict the relative rotary motion between moving parts and transmit loads with low friction. Their performance directly impacts the durability, efficiency and reliability of various machinery. Therefore, bearing failures can lead to economic costs, repair/stoppage times, accidents and regulatory compliance issues. In the context of Industry 4.0, the development of detailed and reliable computational models for simulating bearings’ dynamics plays a crucial role in establishing digital twins and implementing advanced predictive maintenance strategies.</p><p>This work focuses on modelling radial-loaded deep groove ball bearings under the multibody systems dynamics framework and the components of the bearing (inner and outer rings, rolling elements, and cage) are treated as separate bodies. A smooth contact approach is utilised to characterise the contact/impact phenomena, providing flexibility and efficiency in monitoring the whole contact event. In this sense, suitable normal and friction contact force models are used to describe those interactions between the contacting bodies. The main contribution of this work relies on the modelling strategies to represent the cage/rolling element interaction.</p><p>Having that in mind, several multibody models of radial-loaded deep groove ball bearings are developed considering different modelling assumptions, resulting in dynamic analyses with various levels of complexity. The underlying simplifications are described, and their main advantages and shortcomings are discussed. The simulation results demonstrated the significant impact of accurately selecting the modelling parameters. The promising results of this study pave the way for future investigations, extending to other geometries of rolling contact bearings and working conditions.</p>","PeriodicalId":49792,"journal":{"name":"Multibody System Dynamics","volume":"48 3","pages":""},"PeriodicalIF":2.4000,"publicationDate":"2023-12-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Multibody System Dynamics","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.1007/s11044-023-09952-2","RegionNum":2,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"MECHANICS","Score":null,"Total":0}
引用次数: 0
Abstract
Bearings are mechanical components designed to restrict the relative rotary motion between moving parts and transmit loads with low friction. Their performance directly impacts the durability, efficiency and reliability of various machinery. Therefore, bearing failures can lead to economic costs, repair/stoppage times, accidents and regulatory compliance issues. In the context of Industry 4.0, the development of detailed and reliable computational models for simulating bearings’ dynamics plays a crucial role in establishing digital twins and implementing advanced predictive maintenance strategies.
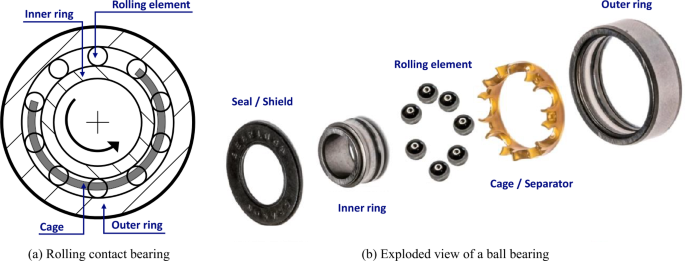
This work focuses on modelling radial-loaded deep groove ball bearings under the multibody systems dynamics framework and the components of the bearing (inner and outer rings, rolling elements, and cage) are treated as separate bodies. A smooth contact approach is utilised to characterise the contact/impact phenomena, providing flexibility and efficiency in monitoring the whole contact event. In this sense, suitable normal and friction contact force models are used to describe those interactions between the contacting bodies. The main contribution of this work relies on the modelling strategies to represent the cage/rolling element interaction.
Having that in mind, several multibody models of radial-loaded deep groove ball bearings are developed considering different modelling assumptions, resulting in dynamic analyses with various levels of complexity. The underlying simplifications are described, and their main advantages and shortcomings are discussed. The simulation results demonstrated the significant impact of accurately selecting the modelling parameters. The promising results of this study pave the way for future investigations, extending to other geometries of rolling contact bearings and working conditions.
期刊介绍:
The journal Multibody System Dynamics treats theoretical and computational methods in rigid and flexible multibody systems, their application, and the experimental procedures used to validate the theoretical foundations.
The research reported addresses computational and experimental aspects and their application to classical and emerging fields in science and technology. Both development and application aspects of multibody dynamics are relevant, in particular in the fields of control, optimization, real-time simulation, parallel computation, workspace and path planning, reliability, and durability. The journal also publishes articles covering application fields such as vehicle dynamics, aerospace technology, robotics and mechatronics, machine dynamics, crashworthiness, biomechanics, artificial intelligence, and system identification if they involve or contribute to the field of Multibody System Dynamics.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


