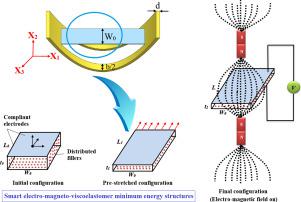
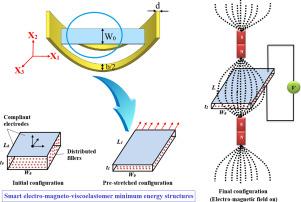
Smart electro-magneto-viscoelastomer minimum energy structures with particle-reinforcements: Theoretical equilibrium and nonlinear dynamics of actuated configurations
A. Khurana , S. Naskar , R.K. Varma , T. Mukhopadhyay
{"title":"Smart electro-magneto-viscoelastomer minimum energy structures with particle-reinforcements: Theoretical equilibrium and nonlinear dynamics of actuated configurations","authors":"A. Khurana , S. Naskar , R.K. Varma , T. Mukhopadhyay","doi":"10.1016/j.ijengsci.2023.103974","DOIUrl":null,"url":null,"abstract":"<div><p>Soft transduction technology is rapidly adopting soft active elastomer-based minimum energy structures because of their distinctive programmable shape-morphing characteristics. For effective device design, an understanding of the nonlinear dynamic behavior is crucial as they often experience time-dependent motion while operating. Moreover, there has been an increasing scientific interest in enhancing the actuation performance of soft active elastomers by imparting particle reinforcements. This article provides a theoretical framework for investigating the nonlinear dynamics of smart composite elastomer-based minimum energy structures (SCEMES) with the provision of non-aligned electric and magnetic fields, leading to an actively programmable pre-stretch paradigm. Unlike conventional actuators, the proposed SCEMES is made up of a polymer that has electro-magnetic properties and is filled with appropriate fillers with specific volume fractions. An electromagneto-viscoelastic model is developed here to predict actuator behavior and investigate the effects of particle reinforcement on equilibrium and actuated configurations. Besides strengthening the polymer, particle reinforcement is observed to enhance the equilibrium angle achieved by the structure with enhanced functionality. The proposed nonlinear dynamic model is extended to investigate a number of critically influential parameters, including shear modulus ratio of fiber to matrix, frame bending stiffness, membrane pre-stretching, and electro-magnetic loading with time-dependent DC and AC modes of actuation. The results reveal that the combined electro-magnetic actuation enhances the actuation range significantly. The attained tip angle of the actuator increases appreciably when the magnetic and electric fields are applied mutually perpendicular to each other, indicating that the direction of applied magnetic field governs the attained actuated configuration. Further, particle reinforcement enrichments result in a depletion in oscillation amplitudes and an increase in excitation frequencies under the AC actuation mode. The efficient semi-analytical framework presented here would be crucial in developing new actuators, smart devices and soft robots for a variety of advanced engineering and medical applications.</p></div>","PeriodicalId":14053,"journal":{"name":"International Journal of Engineering Science","volume":"194 ","pages":"Article 103974"},"PeriodicalIF":5.7000,"publicationDate":"2023-11-28","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.sciencedirect.com/science/article/pii/S0020722523001659/pdfft?md5=0348026a199af7f5d484e1f5aa5cd69c&pid=1-s2.0-S0020722523001659-main.pdf","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Journal of Engineering Science","FirstCategoryId":"5","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0020722523001659","RegionNum":1,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, MULTIDISCIPLINARY","Score":null,"Total":0}
引用次数: 0
Abstract
Soft transduction technology is rapidly adopting soft active elastomer-based minimum energy structures because of their distinctive programmable shape-morphing characteristics. For effective device design, an understanding of the nonlinear dynamic behavior is crucial as they often experience time-dependent motion while operating. Moreover, there has been an increasing scientific interest in enhancing the actuation performance of soft active elastomers by imparting particle reinforcements. This article provides a theoretical framework for investigating the nonlinear dynamics of smart composite elastomer-based minimum energy structures (SCEMES) with the provision of non-aligned electric and magnetic fields, leading to an actively programmable pre-stretch paradigm. Unlike conventional actuators, the proposed SCEMES is made up of a polymer that has electro-magnetic properties and is filled with appropriate fillers with specific volume fractions. An electromagneto-viscoelastic model is developed here to predict actuator behavior and investigate the effects of particle reinforcement on equilibrium and actuated configurations. Besides strengthening the polymer, particle reinforcement is observed to enhance the equilibrium angle achieved by the structure with enhanced functionality. The proposed nonlinear dynamic model is extended to investigate a number of critically influential parameters, including shear modulus ratio of fiber to matrix, frame bending stiffness, membrane pre-stretching, and electro-magnetic loading with time-dependent DC and AC modes of actuation. The results reveal that the combined electro-magnetic actuation enhances the actuation range significantly. The attained tip angle of the actuator increases appreciably when the magnetic and electric fields are applied mutually perpendicular to each other, indicating that the direction of applied magnetic field governs the attained actuated configuration. Further, particle reinforcement enrichments result in a depletion in oscillation amplitudes and an increase in excitation frequencies under the AC actuation mode. The efficient semi-analytical framework presented here would be crucial in developing new actuators, smart devices and soft robots for a variety of advanced engineering and medical applications.
期刊介绍:
The International Journal of Engineering Science is not limited to a specific aspect of science and engineering but is instead devoted to a wide range of subfields in the engineering sciences. While it encourages a broad spectrum of contribution in the engineering sciences, its core interest lies in issues concerning material modeling and response. Articles of interdisciplinary nature are particularly welcome.
The primary goal of the new editors is to maintain high quality of publications. There will be a commitment to expediting the time taken for the publication of the papers. The articles that are sent for reviews will have names of the authors deleted with a view towards enhancing the objectivity and fairness of the review process.
Articles that are devoted to the purely mathematical aspects without a discussion of the physical implications of the results or the consideration of specific examples are discouraged. Articles concerning material science should not be limited merely to a description and recording of observations but should contain theoretical or quantitative discussion of the results.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


