The Social Triad Model: Considering the Deployer in a Novel Approach to Trust in Human–Robot Interaction
IF 3.8
2区 计算机科学
Q2 ROBOTICS
引用次数: 0
Abstract
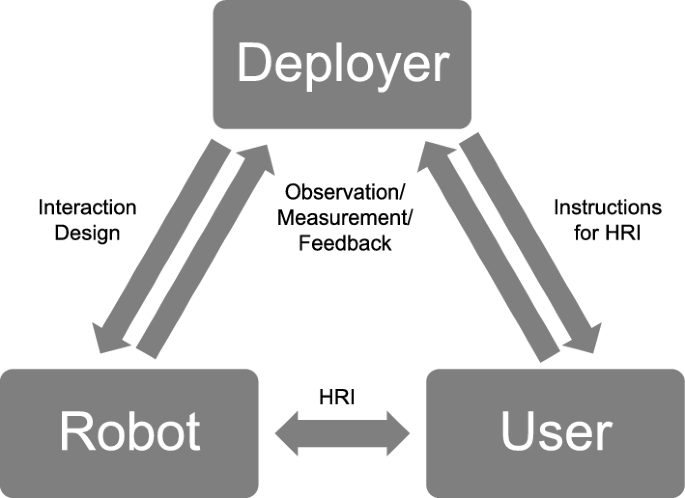
Abstract There is an increasing interest in considering, measuring, and implementing trust in human-robot interaction (HRI). New avenues in this field include identifying social means for robots to influence trust, and identifying social aspects of trust such as a perceptions of robots’ integrity, sincerity or even benevolence. However, questions remain regarding robots’ authenticity in obtaining trust through social means and their capacity to increase such experiences through social interaction with users. We propose that the dyadic model of HRI misses a key complexity: a robot’s trustworthiness may be contingent on the user’s relationship with, and opinion of, the individual or organisation deploying the robot (termed here, Deployer). We present a case study in three parts on researching HRI and a LEGO ® Serious ® Play focus group on care robotics to indicate how Users’ trust towards the Deployer can affect trust towards robots and robotic research. Our Social Triad model (User, Robot, Deployer) offers novel avenues for exploring trust in a social context.
社会三元模型:考虑部署者在人机交互信任中的新方法
人们对人机交互(HRI)中信任的考虑、测量和实现越来越感兴趣。这一领域的新途径包括确定机器人影响信任的社会手段,以及确定信任的社会方面,如对机器人正直、真诚甚至仁慈的看法。然而,关于机器人通过社交手段获得信任的真实性,以及它们通过与用户的社交互动来增加这种体验的能力,问题仍然存在。我们认为HRI的二元模型忽略了一个关键的复杂性:机器人的可信度可能取决于用户与部署机器人的个人或组织(此处称为部署者)的关系和意见。我们提出了一个案例研究,分三部分研究HRI和LEGO®Serious®Play护理机器人焦点小组,以表明用户对部署者的信任如何影响对机器人和机器人研究的信任。我们的社会三元模型(用户、机器人、部署者)为探索社会环境中的信任提供了新的途径。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

International Journal of Social Robotics
ROBOTICS-
CiteScore
9.80
自引率
8.50%
发文量
95
期刊介绍:
Social Robotics is the study of robots that are able to interact and communicate among themselves, with humans, and with the environment, within the social and cultural structure attached to its role. The journal covers a broad spectrum of topics related to the latest technologies, new research results and developments in the area of social robotics on all levels, from developments in core enabling technologies to system integration, aesthetic design, applications and social implications. It provides a platform for like-minded researchers to present their findings and latest developments in social robotics, covering relevant advances in engineering, computing, arts and social sciences.
The journal publishes original, peer reviewed articles and contributions on innovative ideas and concepts, new discoveries and improvements, as well as novel applications, by leading researchers and developers regarding the latest fundamental advances in the core technologies that form the backbone of social robotics, distinguished developmental projects in the area, as well as seminal works in aesthetic design, ethics and philosophy, studies on social impact and influence, pertaining to social robotics.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


