NimbRo Wins ANA Avatar XPRIZE Immersive Telepresence Competition: Human-Centric Evaluation and Lessons Learned
IF 3.8
2区 计算机科学
Q2 ROBOTICS
引用次数: 0
Abstract
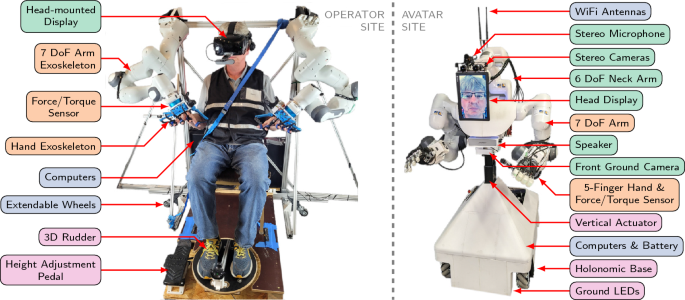
Abstract Robotic avatar systems can enable immersive telepresence with locomotion, manipulation, and communication capabilities. We present such an avatar system, based on the key components of immersive 3D visualization and transparent force-feedback telemanipulation. Our avatar robot features an anthropomorphic upper body with dexterous hands. The remote human operator drives the arms and fingers through an exoskeleton-based operator station, which provides force feedback both at the wrist and for each finger. The robot torso is mounted on a holonomic base, providing omnidirectional locomotion on flat floors, controlled using a 3D rudder device. Finally, the robot features a 6D movable head with stereo cameras, which stream images to a VR display worn by the operator. Movement latency is hidden using spherical rendering. The head also carries a telepresence screen displaying an animated image of the operator’s face, enabling direct interaction with remote persons. Our system won the $10 M ANA Avatar XPRIZE competition, which challenged teams to develop intuitive and immersive avatar systems that could be operated by briefly trained judges. We analyze our successful participation in the semifinals and finals and provide insight into our operator training and lessons learned. In addition, we evaluate our system in a user study that demonstrates its intuitive and easy usability.
NimbRo赢得ANA Avatar XPRIZE沉浸式远程呈现竞赛:以人为中心的评估和经验教训
机器人化身系统可以使身临其境的远程呈现与运动,操作和通信能力。本文提出了一种基于沉浸式三维可视化和透明力反馈遥控的虚拟化身系统。我们的化身机器人具有拟人化的上半身和灵巧的双手。远程操作人员通过基于外骨骼的操作站驱动手臂和手指,该操作站在手腕和每个手指上提供力反馈。机器人躯干安装在一个完整的基座上,在平坦的地板上提供全方位的运动,使用3D方向舵装置进行控制。最后,该机器人的特点是带有立体摄像头的6D可移动头部,可以将图像传输到操作员佩戴的VR显示器上。使用球面渲染隐藏运动延迟。头部还带有一个远程呈现屏幕,显示操作员面部的动画图像,使其能够与远程人员直接交互。我们的系统赢得了价值1000万美元的ANA Avatar XPRIZE竞赛,该竞赛要求团队开发直观和沉浸式的Avatar系统,这些系统可以由经过简单培训的评委操作。我们分析了我们在半决赛和决赛中的成功参与,并提供了我们对操作员的培训和经验教训的见解。此外,我们在用户研究中评估了我们的系统,证明了它的直观和易于使用。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

International Journal of Social Robotics
ROBOTICS-
CiteScore
9.80
自引率
8.50%
发文量
95
期刊介绍:
Social Robotics is the study of robots that are able to interact and communicate among themselves, with humans, and with the environment, within the social and cultural structure attached to its role. The journal covers a broad spectrum of topics related to the latest technologies, new research results and developments in the area of social robotics on all levels, from developments in core enabling technologies to system integration, aesthetic design, applications and social implications. It provides a platform for like-minded researchers to present their findings and latest developments in social robotics, covering relevant advances in engineering, computing, arts and social sciences.
The journal publishes original, peer reviewed articles and contributions on innovative ideas and concepts, new discoveries and improvements, as well as novel applications, by leading researchers and developers regarding the latest fundamental advances in the core technologies that form the backbone of social robotics, distinguished developmental projects in the area, as well as seminal works in aesthetic design, ethics and philosophy, studies on social impact and influence, pertaining to social robotics.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


