Multibody model of the human-inspired robot CHARMIE
IF 2.4
2区 工程技术
Q2 MECHANICS
引用次数: 0
Abstract
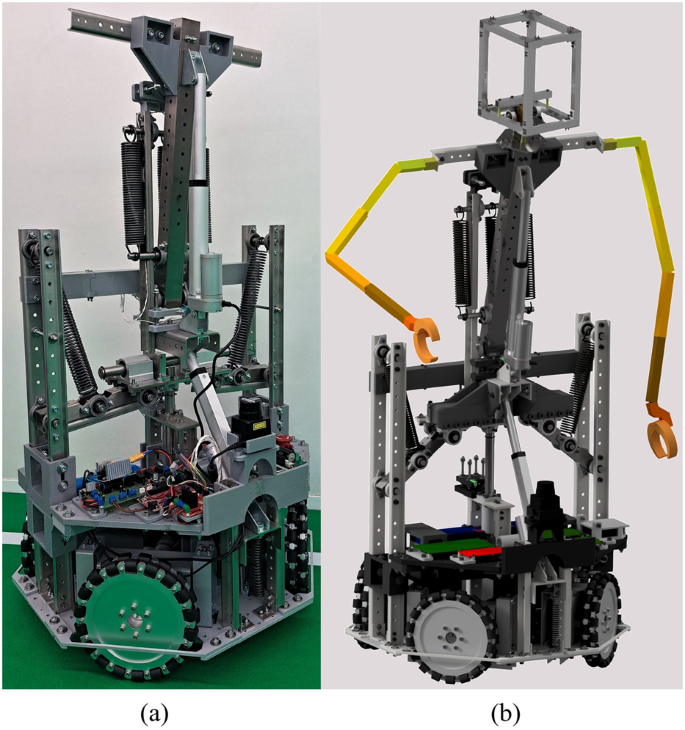
Abstract The rapid ageing of the worldwide population raises pressing concerns related to ensuring proper healthcare and quality of life for older adults. A human-like mobile domestic robot, named CHARMIE, is being produced to aid in these situations by performing household chores, thus increasing the autonomy of persons with mobility limitations. The present work provides a valuable contribution to the development of CHARMIE by building a simulation environment that computes the system’s main dynamics. The obtained environment is used to evaluate the quality of the robot’s control system, to perform its structural optimization and to allow a proper selection of actuators. The system is tackled as a kinematic tree that starts on the robot’s base and then splits into three branches at the torso: the left arm, the right arm, and the head. The multibody model solves the forward kinematics and inverse dynamics of the main mechanisms by employing two recursive algorithms centred around the Newton–Euler formulation. A novel, modular, and efficient seven-step methodology was created to implement these two algorithms and program a simulator from start to finish. These seven steps include studying the system’s configuration, converting its properties into software inputs, and computing the phenomena that cannot be automatically addressed by the two recursive formulations. The presented methodology was fully validated by comparing its results to those obtained from a commercial software; the two models produced identical results.
仿人机器人CHARMIE的多体模型
摘要:全球人口的快速老龄化提出了迫切关注的相关问题,以确保适当的医疗保健和生活质量的老年人。一种名为CHARMIE的人形移动家庭机器人正在生产中,它可以在这些情况下帮助人们做家务,从而增加行动不便的人的自主性。目前的工作通过建立计算系统主要动力学的仿真环境,为CHARMIE的发展提供了有价值的贡献。得到的环境用于评估机器人控制系统的质量,进行结构优化,并允许适当选择执行器。该系统被设计成一棵运动树,从机器人的底部开始,然后在躯干处分成三个分支:左臂、右臂和头部。多体模型采用以牛顿-欧拉公式为中心的两种递归算法求解主要机构的正运动学和逆动力学。一种新颖的、模块化的、高效的七步方法被创建来实现这两种算法,并从头到尾编程一个模拟器。这七个步骤包括研究系统的配置,将其属性转换为软件输入,以及计算无法通过两个递归公式自动解决的现象。通过与商业软件的结果进行比较,充分验证了所提出的方法的有效性;这两种模型得出了相同的结果。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

CiteScore
6.00
自引率
17.60%
发文量
46
审稿时长
12 months
期刊介绍:
The journal Multibody System Dynamics treats theoretical and computational methods in rigid and flexible multibody systems, their application, and the experimental procedures used to validate the theoretical foundations.
The research reported addresses computational and experimental aspects and their application to classical and emerging fields in science and technology. Both development and application aspects of multibody dynamics are relevant, in particular in the fields of control, optimization, real-time simulation, parallel computation, workspace and path planning, reliability, and durability. The journal also publishes articles covering application fields such as vehicle dynamics, aerospace technology, robotics and mechatronics, machine dynamics, crashworthiness, biomechanics, artificial intelligence, and system identification if they involve or contribute to the field of Multibody System Dynamics.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


