Capturability-based Fuzzy Footstep Planner for a Biped Robot with Centroidal Compliance
Abstract
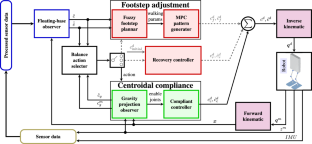
Compliance motion and footstep adjustment are active balance control strategies from learning human subconscious behaviors. The force estimation without direct end-actuator force measurement and the optimal footsteps based on complex analytical calculation are still challenging tasks for elementary and kid-size position-controlled robots. In this paper, an online compliant controller with Gravity Projection Observer (GPO), which can express the external force condition of perturbations by the estimated Projection of Gravity (PoG) with estimation covariance, is proposed for the realization of disturbance absorption, with which the robustness of the humanoid contact with environments can be maintained. The fuzzy footstep planner based on capturability analysis is proposed, and the Model Predictive Control (MPC) is applied to generate the desired steps. The fuzzification rules are well-designed and give the corresponding control output responding to complex and changeable external disturbances. To validate the presented methods, a series of experiments on a real humanoid robot are conducted. The results verify the effectiveness of the proposed balance control framework.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


