Numerical and experimental investigation on the synthesis of extended Kalman filters for cable-driven parallel robots modeled through DAEs
IF 2.4
2区 工程技术
Q2 MECHANICS
引用次数: 0
Abstract
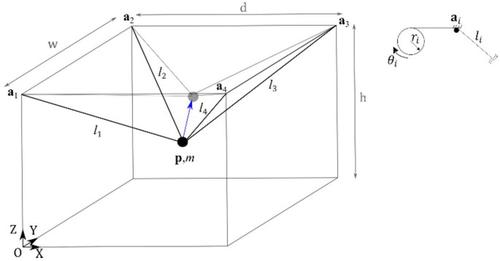
Abstract Cable-driven parallel robots are parallel robots where light-weight cables replace rigid bodies to move an end-effector. Their peculiar design allows obtaining large workspaces, high-dynamic handlings, ease of reconfigurability and, in general, low-cost architecture. Knowing the full state variables of a cable robot may be essential to implement advanced control and monitoring strategies and imposes the development of state observers. In this work a general approach to develop nonlinear state observers based on an extended Kalman filter (EKF) is proposed and validated both numerically and experimentally by referring to a cable-suspended parallel robot. The state observer is based on a system model obtained by converting a set of differential algebraic equations into ordinary differential equations through different formulations: the penalty formulation, the Udwadia–Kalaba formulation, and the Udwadia–Kalaba–Phohomsiri formulation, which have been chosen since they can handle the presence of redundant constraints as often happens in cable-driven parallel robots. In the numerical investigation, the EKF is validated simulating encoders heavily affected by quantization errors to demonstrate the filtering capabilities of EKF. In the experimental investigation, a very challenging validation is proposed: only two sensors measuring the rotations of two motors are used to estimate the actual position and velocity of the end-effector. This result cannot be achieved by sole forward kinematics and clearly proves the effectiveness of the proposed observer.
基于DAEs建模的缆索驱动并联机器人扩展卡尔曼滤波器综合的数值与实验研究
摘要缆索驱动并联机器人是一种用轻质缆索代替刚体驱动末端执行器运动的并联机器人。它们独特的设计允许获得大的工作空间,高动态处理,易于重新配置,并且通常是低成本的架构。了解缆索机器人的全部状态变量对于实施先进的控制和监测策略以及对状态观测器的开发至关重要。本文提出了一种基于扩展卡尔曼滤波(EKF)的非线性状态观测器的一般方法,并以悬索并联机器人为例进行了数值和实验验证。状态观测器基于将一组微分代数方程通过不同的形式转换为常微分方程得到的系统模型:罚式、Udwadia-Kalaba式和Udwadia-Kalaba - phohomsiri式,选择这些形式是因为它们可以处理在索驱动并联机器人中经常发生的冗余约束的存在。在数值研究中,对受量化误差严重影响的编码器进行了仿真,验证了EKF的滤波能力。在实验研究中,提出了一个非常具有挑战性的验证:仅使用测量两个电机旋转的两个传感器来估计末端执行器的实际位置和速度。这一结果不能通过单纯的正运动学得到,清楚地证明了所提出观测器的有效性。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

CiteScore
6.00
自引率
17.60%
发文量
46
审稿时长
12 months
期刊介绍:
The journal Multibody System Dynamics treats theoretical and computational methods in rigid and flexible multibody systems, their application, and the experimental procedures used to validate the theoretical foundations.
The research reported addresses computational and experimental aspects and their application to classical and emerging fields in science and technology. Both development and application aspects of multibody dynamics are relevant, in particular in the fields of control, optimization, real-time simulation, parallel computation, workspace and path planning, reliability, and durability. The journal also publishes articles covering application fields such as vehicle dynamics, aerospace technology, robotics and mechatronics, machine dynamics, crashworthiness, biomechanics, artificial intelligence, and system identification if they involve or contribute to the field of Multibody System Dynamics.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


