{"title":"Combined Ankle Robot Training and Robot-assisted Gait Training Improved the Gait Pattern of a Patient with Chronic Traumatic Brain Injury.","authors":"Takayuki Kamimoto, Yuichiro Hosoi, Kenya Tanamachi, Rieko Yamamoto, Yuka Yamada, Tatsuya Teramae, Tomoyuki Noda, Fuminari Kaneko, Tetsuya Tsuji, Michiyuki Kawakami","doi":"10.2490/prm.20230024","DOIUrl":null,"url":null,"abstract":"<p><strong>Background: </strong>: Walking disability caused by central nervous system injury often lingers. In the chronic phase, there is great need to improve walking speed and gait, even for patients who walk independently. Robot-assisted gait training (RAGT) has been widely used, but few studies have focused on improving gait patterns, and its effectiveness for motor function has been limited. This report describes the combination of \"RAGT to learn the gait pattern\" and \"ankle robot training to improve motor function\" in a patient with chronic stage brain injury.</p><p><strong>Case: </strong>: A 34-year-old woman suffered a traumatic brain injury 5 years ago. She had residual right hemiplegia [Fugl-Meyer Assessment-Lower Extremity (FMA-LE): 18 points] and mild sensory impairment, but she walked independently with a short leg brace and a cane. Her comfortable gait speed was 0.57 m/s without an orthosis, and her 6-m walk test distance was 240 m. The Gait Assessment and Intervention Tool (G.A.I.T.) score was 35 points. After hospitalization, ankle robot training was performed daily, with RAGT performed 10 times in total. Post-intervention evaluation performed on Day 28 showed: FMA-LE, 23 points; comfortable walking speed, 0.69 m/s; G.A.I.T., 27 points; and three-dimensional motion analysis showed ankle dorsiflexion improved from 3.22° to 12.59° and knee flexion improved from 1.75° to 16.54° in the swing phase.</p><p><strong>Discussion: </strong>: This is one of few studies to have examined the combination of two robots. Combining the features of each robot improved the gait pattern and motor function, even in the chronic phase.</p>","PeriodicalId":74584,"journal":{"name":"Progress in rehabilitation medicine","volume":"8 ","pages":"20230024"},"PeriodicalIF":0.0000,"publicationDate":"2023-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://ftp.ncbi.nlm.nih.gov/pub/pmc/oa_pdf/67/9b/prm-8-20230024.PMC10427343.pdf","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Progress in rehabilitation medicine","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.2490/prm.20230024","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"","JCRName":"","Score":null,"Total":0}
引用次数: 0
Abstract
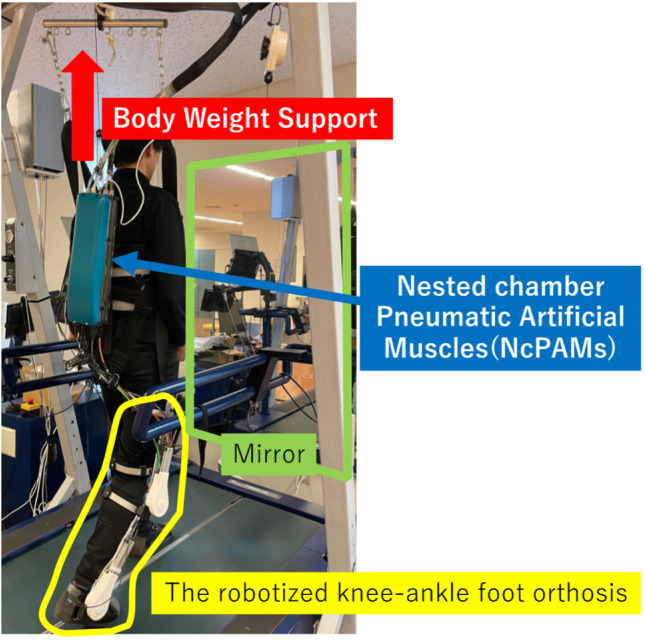
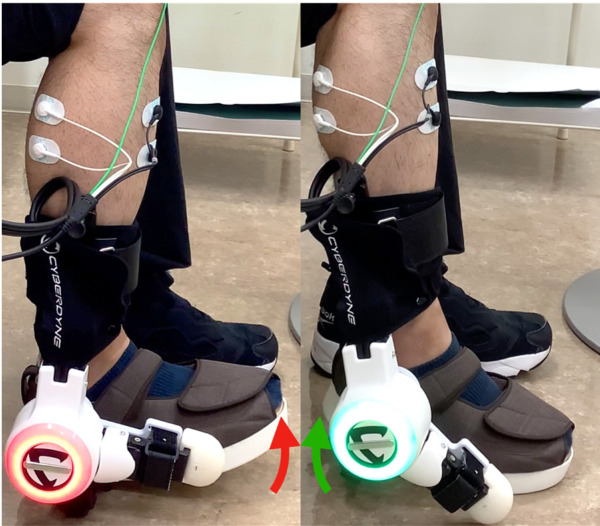
Background: : Walking disability caused by central nervous system injury often lingers. In the chronic phase, there is great need to improve walking speed and gait, even for patients who walk independently. Robot-assisted gait training (RAGT) has been widely used, but few studies have focused on improving gait patterns, and its effectiveness for motor function has been limited. This report describes the combination of "RAGT to learn the gait pattern" and "ankle robot training to improve motor function" in a patient with chronic stage brain injury.
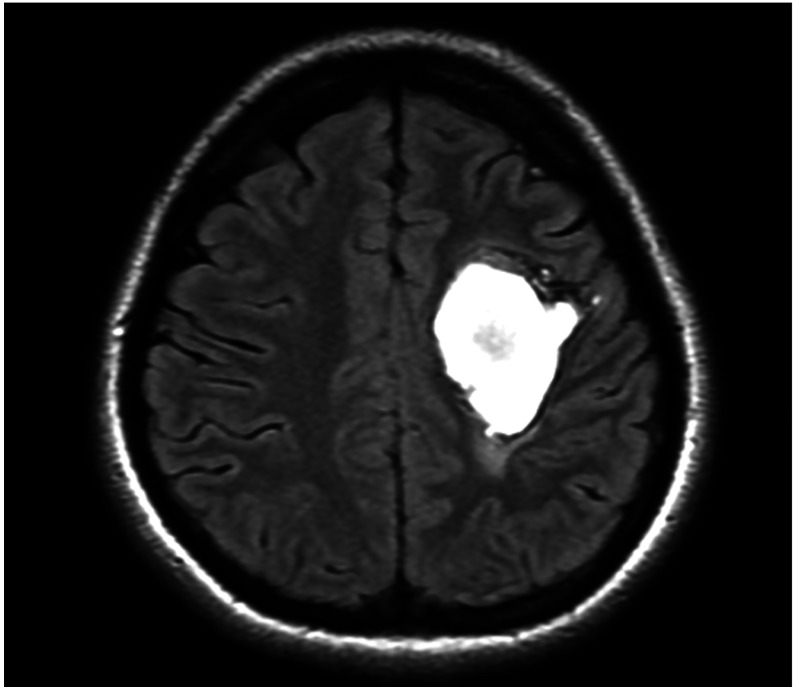
Case: : A 34-year-old woman suffered a traumatic brain injury 5 years ago. She had residual right hemiplegia [Fugl-Meyer Assessment-Lower Extremity (FMA-LE): 18 points] and mild sensory impairment, but she walked independently with a short leg brace and a cane. Her comfortable gait speed was 0.57 m/s without an orthosis, and her 6-m walk test distance was 240 m. The Gait Assessment and Intervention Tool (G.A.I.T.) score was 35 points. After hospitalization, ankle robot training was performed daily, with RAGT performed 10 times in total. Post-intervention evaluation performed on Day 28 showed: FMA-LE, 23 points; comfortable walking speed, 0.69 m/s; G.A.I.T., 27 points; and three-dimensional motion analysis showed ankle dorsiflexion improved from 3.22° to 12.59° and knee flexion improved from 1.75° to 16.54° in the swing phase.
Discussion: : This is one of few studies to have examined the combination of two robots. Combining the features of each robot improved the gait pattern and motor function, even in the chronic phase.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


