A Gecko-Inspired Robot with a Flexible Spine Driven by Shape Memory Alloy Springs.
IF 6.1
2区 计算机科学
Q1 ROBOTICS
引用次数: 1
Abstract
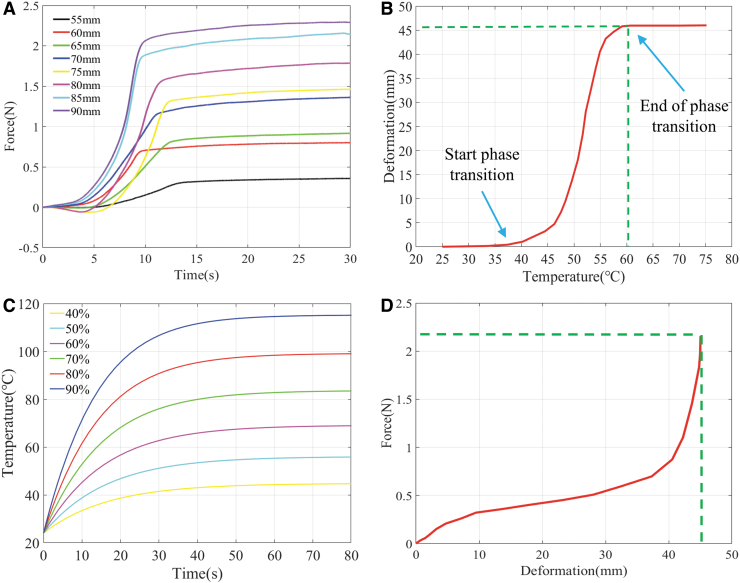
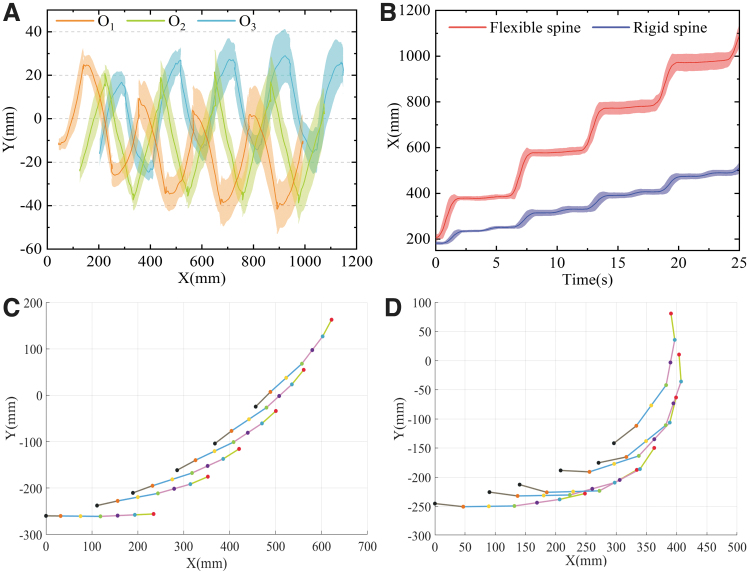
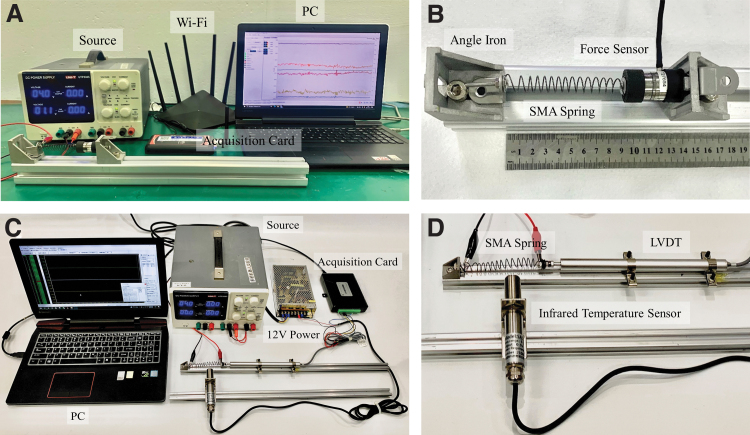
The majority of sprawling-posture quadrupedal vertebrates, such as geckos and lizards, adopt a cyclical lateral swing pattern of their trunk that is coordinated with limb movements to provide extraordinary flexibility and mobility. Inspired by the gecko's locomotory gait and posture, a gecko-like robot with a flexible spine driven by shape memory alloy (SMA) springs was proposed in this work. The static parameters of the SMA spring were experimentally measured, and the flexible spine driven by SMA springs can be deflected bidirectionally. A kinematic model of the spine mechanism was established, and the mathematical relationship between the thermodynamic behavior of the SMA springs and spinal deflection was systematically analyzed. When a gecko trots with a lateral swing pattern of its trunk, the body and the spine show a standing wave shape and a single-peak C-type curve, respectively. The lateral spine deflection and trotting gait were combined in a collaborative model of a flexible spine and limbs to describe in detail the specific relationships between leg joint variables and spine deflection angle. Planar motion tests of a prototype robot were also conducted by using four high-speed cameras to record the trajectory of each point of the body, which verified the proposed model. From the acquired results, it was demonstrated that, compared with a rigid body, a robot with a flexible spine has a longer stride length, higher speed, and a greatly reduced turning radius.
形状记忆合金弹簧驱动柔性脊柱的壁虎仿生机器人。
大多数四肢伸展的四足脊椎动物,如壁虎和蜥蜴,躯干采用周期性的横向摆动模式,与肢体运动协调,提供非凡的灵活性和机动性。本文以壁虎的运动步态和姿态为灵感,设计了一种由形状记忆合金(SMA)弹簧驱动的具有柔性脊柱的仿壁虎机器人。实验测量了SMA弹簧的静态参数,表明SMA弹簧驱动的柔性脊柱可以实现双向偏转。建立了脊柱机构的运动学模型,系统分析了SMA弹簧热力学行为与脊柱挠度之间的数学关系。壁虎小跑时躯干横向摆动,身体呈驻波状,脊柱呈单峰c型曲线。将脊柱侧倾和小跑步态结合在一个柔性脊柱和四肢的协同模型中,详细描述了下肢关节变量与脊柱侧倾角度之间的具体关系。利用4台高速摄像机对机器人原型进行了平面运动测试,记录了机器人身体各点的运动轨迹,验证了模型的正确性。结果表明,与刚体机器人相比,具有柔性脊柱的机器人具有更长的步幅、更高的速度和更小的转弯半径。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

Soft Robotics
ROBOTICS-
CiteScore
15.50
自引率
5.10%
发文量
128
期刊介绍:
Soft Robotics (SoRo) stands as a premier robotics journal, showcasing top-tier, peer-reviewed research on the forefront of soft and deformable robotics. Encompassing flexible electronics, materials science, computer science, and biomechanics, it pioneers breakthroughs in robotic technology capable of safe interaction with living systems and navigating complex environments, natural or human-made.
With a multidisciplinary approach, SoRo integrates advancements in biomedical engineering, biomechanics, mathematical modeling, biopolymer chemistry, computer science, and tissue engineering, offering comprehensive insights into constructing adaptable devices that can undergo significant changes in shape and size. This transformative technology finds critical applications in surgery, assistive healthcare devices, emergency search and rescue, space instrument repair, mine detection, and beyond.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


