Ling Li, Xiaojian Li, Bo Ouyang, Hangjie Mo, Hongliang Ren, Shanlin Yang
{"title":"Three-Dimensional Collision Avoidance Method for Robot-Assisted Minimally Invasive Surgery.","authors":"Ling Li, Xiaojian Li, Bo Ouyang, Hangjie Mo, Hongliang Ren, Shanlin Yang","doi":"10.34133/cbsystems.0042","DOIUrl":null,"url":null,"abstract":"<p><p>In the robot-assisted minimally invasive surgery, if a collision occurs, the robot system program could be damaged, and normal tissues could be injured. To avoid collisions during surgery, a 3-dimensional collision avoidance method is proposed in this paper. The proposed method is predicated on the design of 3 strategic vectors: the collision-with-instrument-avoidance (CI) vector, the collision-with-tissues-avoidance (CT) vector, and the constrained-control (CC) vector. The CI vector demarcates 3 specific directions to forestall collision among the surgical instruments. The CT vector, on the other hand, comprises 2 components tailored to prevent inadvertent contact between the robot-controlled instrument and nontarget tissues. Meanwhile, the CC vector is introduced to guide the endpoint of the robot-controlled instrument toward the desired position, ensuring precision in its movements, in alignment with the surgical goals. Simulation results verify the proposed collision avoidance method for robot-assisted minimally invasive surgery. The code and data are available at https://github.com/cynerelee/collision-avoidance.</p>","PeriodicalId":72764,"journal":{"name":"Cyborg and bionic systems (Washington, D.C.)","volume":"4 ","pages":"0042"},"PeriodicalIF":18.1000,"publicationDate":"2023-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10479965/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Cyborg and bionic systems (Washington, D.C.)","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.34133/cbsystems.0042","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, BIOMEDICAL","Score":null,"Total":0}
引用次数: 0
Abstract
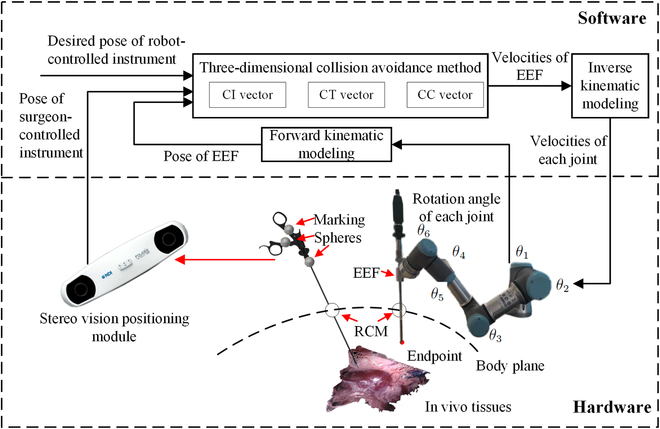
In the robot-assisted minimally invasive surgery, if a collision occurs, the robot system program could be damaged, and normal tissues could be injured. To avoid collisions during surgery, a 3-dimensional collision avoidance method is proposed in this paper. The proposed method is predicated on the design of 3 strategic vectors: the collision-with-instrument-avoidance (CI) vector, the collision-with-tissues-avoidance (CT) vector, and the constrained-control (CC) vector. The CI vector demarcates 3 specific directions to forestall collision among the surgical instruments. The CT vector, on the other hand, comprises 2 components tailored to prevent inadvertent contact between the robot-controlled instrument and nontarget tissues. Meanwhile, the CC vector is introduced to guide the endpoint of the robot-controlled instrument toward the desired position, ensuring precision in its movements, in alignment with the surgical goals. Simulation results verify the proposed collision avoidance method for robot-assisted minimally invasive surgery. The code and data are available at https://github.com/cynerelee/collision-avoidance.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


